


Marius Brataas
-
Posts
9 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Posts posted by Marius Brataas
-
-
Hey everyone
")
I've compiled my own kernel using this awesome tool, and I'm now running it on a tinker board.
Everything's been working fine, except for one annoying thing I just ran into: I can't use the GPIO pins.
When I try to use a pin in python I just get this message back: "RuntimeError: This gpio is set to other function!".
If I run Debian I can use the gpio just fine, but I need some kernel modules that doesn't ship with Debian. That's why I've compiled my own armbian kernel.
Anyways, any idea on how to fix this? Any special module I should add when compiling the kernel?
Thanks
Marius
-
Hey!
I recently got a CAN-bus up and running on a Tinkerboard running Armbian, but I've run into another problem here:
The CAN-bus buffer fills up.
After sending a few messages I get an error saying "No buffer space available".
I've noticed that some other people are solving this by increasing the buffer size, but that seems like a weird solution to me.
And it wouldn't really help me much. I need to empty this buffer when I read from it, or manually (without restarting the CAN-bus).
Any ideas on how to do that?
Thanks
-
Thanks
Everything worked out great!
-
5 minutes ago, Igor said:
We made this tool with the purpose to make kernel recompilation as easy as possible. In just about every way you have many potential obstacles to overcome. All those Youtube guides are usually made for Intel world where things usually just work. We are mostly not there yet.You need some x86 desktop computer where you recompile the kernel in a virtual machine, transfer to your Tinkerboard via a network or via SD, install DEB package and reboot Tinkerboot into a new kernel. If you use our tools you have small chances to fail for anything else you need some experiences. It is possible to recompile kernel on your board, but ... you are on your own. Sources are accessible this way:
apt install linux-source-4.14.14-next-rockchipI think I'll rather try to use your tools
Thanks for you help! I'll try the approach you described
-
7 minutes ago, Igor said:
Now read the error text. We don't support native compiling ... remember that you need to include all those patches https://github.com/armbian/build/tree/master/patch/kernel/rockchip-next if you want to proceed this way.
So... Configure on a normal desktop computer, compile, write to SD-card and insert back into tinkerboard, is that what this means?
Sorry, I am very new to linux and kernels
-
root@tinkerboard:~# apt-get -y -qq install git root@tinkerboard:~# git clone --depth 1 https://github.com/armbian/build Cloning into 'build'... remote: Counting objects: 1809, done. remote: Compressing objects: 100% (1506/1506), done. remote: Total 1809 (delta 344), reused 1285 (delta 190), pack-reused 0 Receiving objects: 100% (1809/1809), 48.36 MiB | 8.67 MiB/s, done. Resolving deltas: 100% (344/344), done. Checking connectivity... done. Checking out files: 100% (2206/2206), done. root@tinkerboard:~# cd build root@tinkerboard:~/build# ./compile.sh [ o.k. ] Using config file [ config-default.conf ] [ o.k. ] This script will try to update Already up-to-date. Already on 'master' Your branch is up-to-date with 'origin/master'. [ o.k. ] Preparing [ host ] [ .... ] Please read documentation to set up proper compilation environment [ .... ] http://www.armbian.com/using-armbian-tools/ [ error ] ERROR in function prepare_host [ general.sh:503 ] [ error ] Running this tool on non x86-x64 build host in not supported [ o.k. ] Process terminated
Trying to follow the very first steps in that post produces this output.
-
Thanks Igor, but I haven't really gotten any further.
I've tried to compile my own kernel like shown in this video, and this way I was able to add the CAN-bus modules to the config during menuconfig.
However, I can't seem to figure out how to boot with that new kernel now.
The boot directory on my Tinkerboard is currently looking like this:
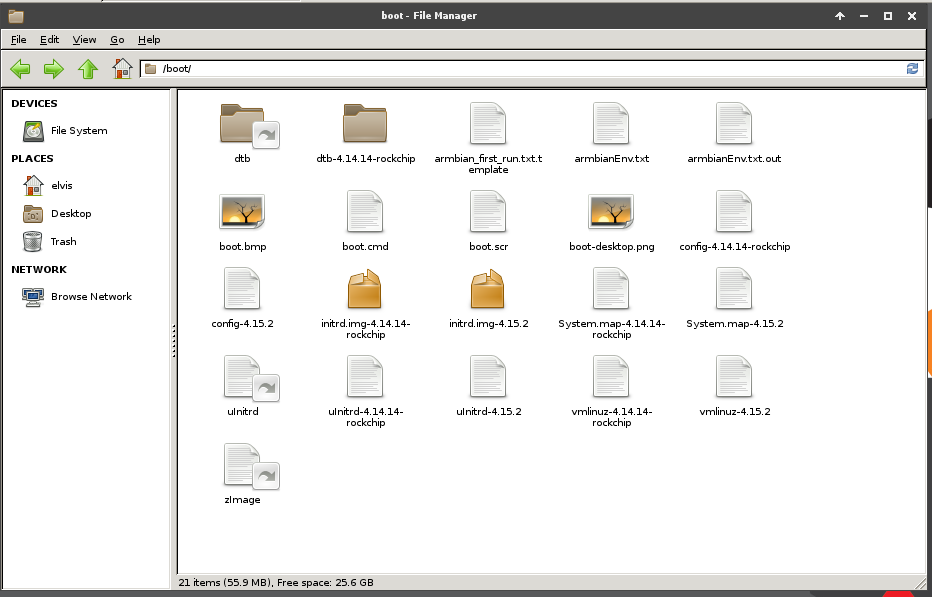
Any ideas or other strategies?
All I really need is normal Armbian but(!) with the CAN modules added to the kernel.
All help appreciated, thanks
-
Hey,
I’m running armbian on a tinkerboard and I need to connect to a CAN-bus.
Apparently the usual Linux CAN-kernel-modules aren’t shipped with armbian, so I guess I’ll have to add them manually somehow.
I`ve been trying to do that for two days now without any luck.
I’ve been trying to follow the steps described in other forums, but it haven’t helped.
I really just want to add the necessary modules to my existing kernel.
Any ideas?
CAN-bus with armbian
in Tinkerboard
Posted
Hey again!
I used Igor's excellent software to compile a new kernel and I got the CAN-bus up and running
But I've ran into a new problem. When running this custom kernel the GPIO on my Tinker Board is no longer accessible.
When I try to use a pin in python I just get this message back: "RuntimeError: This gpio is set to other function!".
Any idea why this happens? I thought it would still work on my new kernel, after choosing tinkerboard in the menu of your compilation software, and then choosing the default kernel..
Any hints?
All help appreciated, thanks
Marius