Search the Community
Showing results for tags 'nanopineocore2'.
Found 25 results
-
 Attempting to connect ILI9341 LCD with XPT2046 Touch to NanoPi NEO Core2 and then migrate to NanoPi Duo2. The ILI9341 / XPT2046 peripheral board has shared SPI with a separate slave chip select for the screen and touch controllers. Starting with hardware datasheet for the H3 I see there is lots of support for different chip select implementations. This makes me think I am on good footing from a hardware perspective. What is not clear to me is how the register support for four slave chip selects translates into pin assignments. Reading through spi-sun6i.c., for example, static int sun6i_spi_transfer_one( ... ) uses SUN6I_TFR_CTL_CS_MANUAL which implies software control but I don't understand where the software control is actually done. I'm sure devtree helps configure the drivers but I'm a bit lost wrt hardware support of four slave devices. I suspect that SPI1 Slave 0 is the default mapping assigned to pin 23. Can the hardware default be changed with hardware support or is this always controlled through driver software? Any pointers would help. WoW
Attempting to connect ILI9341 LCD with XPT2046 Touch to NanoPi NEO Core2 and then migrate to NanoPi Duo2. The ILI9341 / XPT2046 peripheral board has shared SPI with a separate slave chip select for the screen and touch controllers. Starting with hardware datasheet for the H3 I see there is lots of support for different chip select implementations. This makes me think I am on good footing from a hardware perspective. What is not clear to me is how the register support for four slave chip selects translates into pin assignments. Reading through spi-sun6i.c., for example, static int sun6i_spi_transfer_one( ... ) uses SUN6I_TFR_CTL_CS_MANUAL which implies software control but I don't understand where the software control is actually done. I'm sure devtree helps configure the drivers but I'm a bit lost wrt hardware support of four slave devices. I suspect that SPI1 Slave 0 is the default mapping assigned to pin 23. Can the hardware default be changed with hardware support or is this always controlled through driver software? Any pointers would help. WoW -
 I've got a NanoPi Neo Core 2 and a NanoPi Neo Air. It bothered me that the USB OTG did not function in host mode. Turns out, the included Armbian .dtb's don't have the parts necessary to define the regulator which pushes power back to a client device when the board needs to run in OTG host mode. You can see the regulator on page 8 of the schematic http://wiki.friendlyarm.com/wiki/images/6/6b/NanoPi_NEO_Core2-V1.0_1707.pdf I found an upstream patch at https://patchwork.kernel.org/patch/9921097/ which defined the missing parts for a Neo Plus 2. I put the relevant parts into an overlay dts file (attached) that can be loaded with sudo armbian-add-overlay otg.dts I've tested this on both of my devices. I assume it should work on other devices with the same wiring. One quirk I didn't figure out though... online sources all used "GPIO_ACTIVE_HIGH" as a kind of defined value, but the version of 'dtc' included with Armbian chokes on it. So instead I just in the equivalent numeric value. otg.dts
I've got a NanoPi Neo Core 2 and a NanoPi Neo Air. It bothered me that the USB OTG did not function in host mode. Turns out, the included Armbian .dtb's don't have the parts necessary to define the regulator which pushes power back to a client device when the board needs to run in OTG host mode. You can see the regulator on page 8 of the schematic http://wiki.friendlyarm.com/wiki/images/6/6b/NanoPi_NEO_Core2-V1.0_1707.pdf I found an upstream patch at https://patchwork.kernel.org/patch/9921097/ which defined the missing parts for a Neo Plus 2. I put the relevant parts into an overlay dts file (attached) that can be loaded with sudo armbian-add-overlay otg.dts I've tested this on both of my devices. I assume it should work on other devices with the same wiring. One quirk I didn't figure out though... online sources all used "GPIO_ACTIVE_HIGH" as a kind of defined value, but the version of 'dtc' included with Armbian chokes on it. So instead I just in the equivalent numeric value. otg.dts -
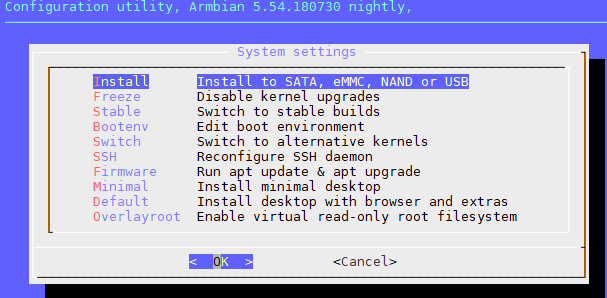
 I successfully installed Armbian Focal¹ on my Neo Core 2 with MiniShield² and SSD. I find no issues after booting boot from SD-card. But I fail to boot from eMMC with System on SATA using nand-sata-install: In the serial console i see the boot process to stick after «Started udev Kernel Device Manager». Any hints how I can unblock from here? [...] U-Boot 2020.04-armbian (Sep 02 2020 - 09:50:54 +0200) Allwinner Technology CPU: Allwinner H5 (SUN50I) Model: FriendlyARM NanoPi NEO Core 2 DRAM: 512 MiB MMC: mmc@1c0f000: 0, mmc@1c11000: 1 Loading Environment from FAT... Unable to use mmc 1:1... In: serial Out: serial Err: serial Net: No ethernet found. MMC: no card present MMC: no card present starting USB... Bus usb@1c1b000: USB EHCI 1.00 scanning bus usb@1c1b000 for devices... 1 USB Device(s) found scanning usb for storage devices... 0 Storage Device(s) found [...] Boot script loaded from mmc [...] Starting kernel ... [...] Welcome to Armbian 20.08.1 Focal! [...] [ OK ] Reached target Local File Systems (Pre). Mounting /tmp... Starting udev Kernel Device Manager... [ OK ] Mounted /tmp. [ OK ] Started udev Kernel Device Manager. [ OK ] Found device /dev/ttyGS0. ¹ Armbian_20.08.1_Nanopineocore2_focal_current_5.8.5_minimal.img ² Armbian forum about Neo Core 2 with MiniShield
I successfully installed Armbian Focal¹ on my Neo Core 2 with MiniShield² and SSD. I find no issues after booting boot from SD-card. But I fail to boot from eMMC with System on SATA using nand-sata-install: In the serial console i see the boot process to stick after «Started udev Kernel Device Manager». Any hints how I can unblock from here? [...] U-Boot 2020.04-armbian (Sep 02 2020 - 09:50:54 +0200) Allwinner Technology CPU: Allwinner H5 (SUN50I) Model: FriendlyARM NanoPi NEO Core 2 DRAM: 512 MiB MMC: mmc@1c0f000: 0, mmc@1c11000: 1 Loading Environment from FAT... Unable to use mmc 1:1... In: serial Out: serial Err: serial Net: No ethernet found. MMC: no card present MMC: no card present starting USB... Bus usb@1c1b000: USB EHCI 1.00 scanning bus usb@1c1b000 for devices... 1 USB Device(s) found scanning usb for storage devices... 0 Storage Device(s) found [...] Boot script loaded from mmc [...] Starting kernel ... [...] Welcome to Armbian 20.08.1 Focal! [...] [ OK ] Reached target Local File Systems (Pre). Mounting /tmp... Starting udev Kernel Device Manager... [ OK ] Mounted /tmp. [ OK ] Started udev Kernel Device Manager. [ OK ] Found device /dev/ttyGS0. ¹ Armbian_20.08.1_Nanopineocore2_focal_current_5.8.5_minimal.img ² Armbian forum about Neo Core 2 with MiniShield
-
It seems the links to download the new Focal build for the nanopi neo core 2 are dead. https://www.armbian.com/nanopi-neo-core-2-lts/ Neither direct nor torrent seem to be working.
-
Hi I want use spi in slave mode, how i can enable slave? cat /boot/armbianEnv.txt verbosity=1 console=serial overlay_prefix=sun50i-h5 overlays=spi-add-cs1 spi-jedec-nor spi-spidev param_spidev_spi_bus=0 param_spidev_max_freq=100000000 rootdev=UUID=47313251-44b3-4a77-aef5-c53397e3a685 rootfstype=ext4 usbstoragequirks=0x2537:0x1066:u,0x2537:0x1068:u
-
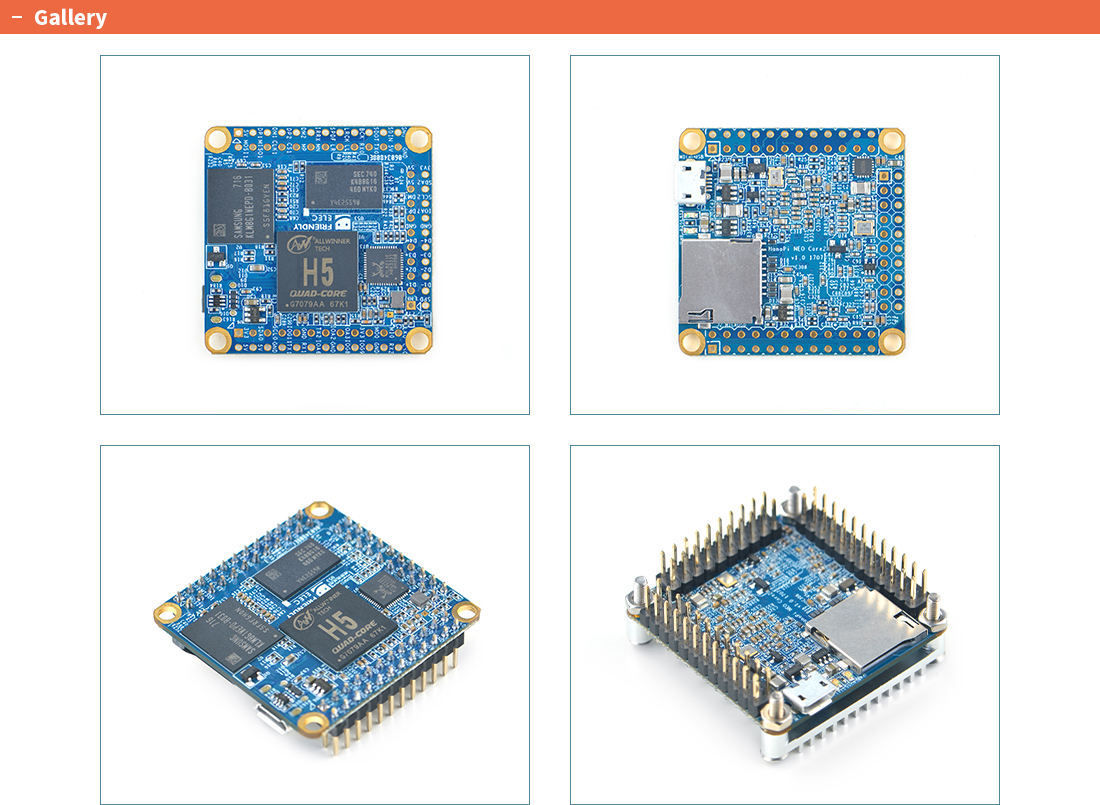
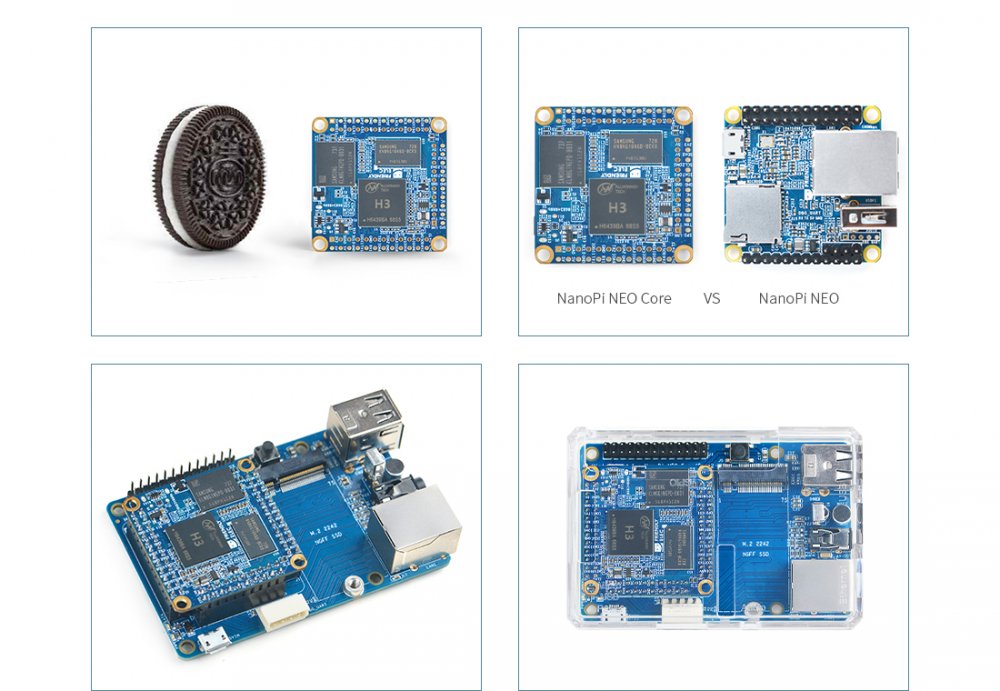
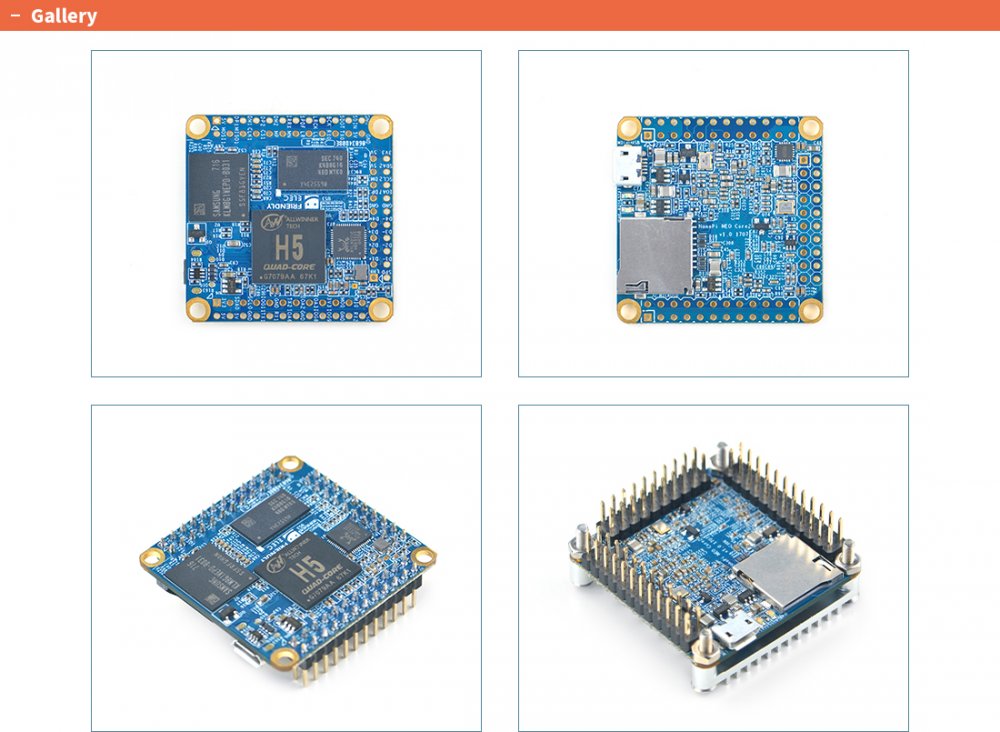
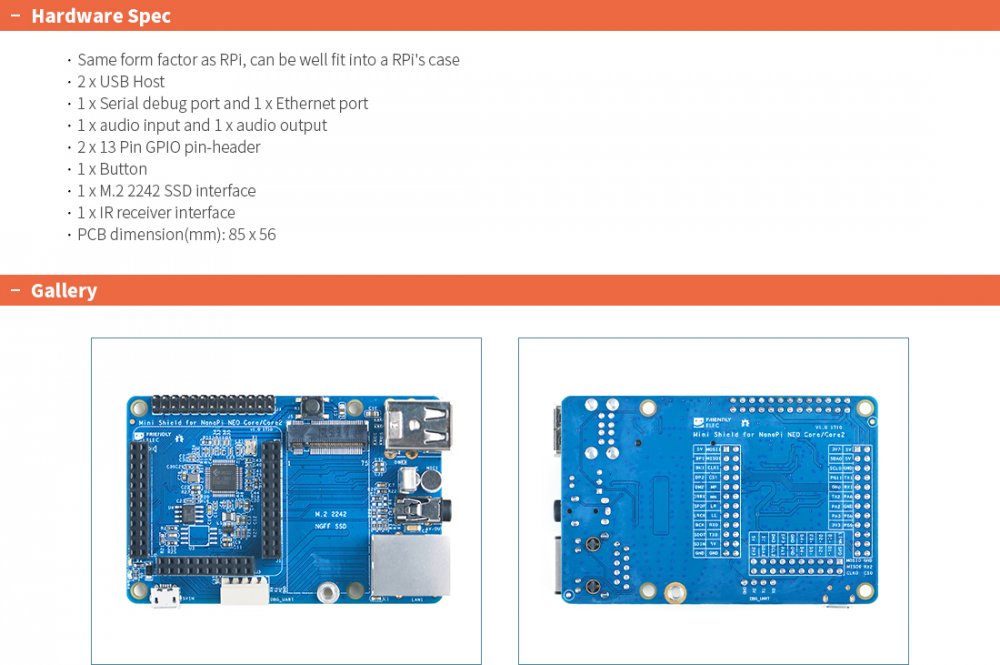
New toys to play The NanoPi Neo Core and Core2 are the Core-PCB without Connectors. Only Pin-holes in 2.54mm Pitch. But as the Pictures did show - there will be a Docking-Board like on the NanoPi Duo The price for the normal NanoPi Neo jumps from $7,99 to $9,99 and the new Neo Core now costs $7,99 (256MB and no eMMC) BUT has optional - also like the Neo Core2 (here 8GB default) - 8GB eMMC (512MB and 8GB eMMC = +$10 on the $7,99 Neo Core) The Neo Core2 does cost $24,99 but do have 1GB of Ram and (default) 8GB of eMMC (more options later). (long description show also - a obsolete? - option for only 512MB. But the board feature-icons are for 1GB) They do wrote that the new Core NanoPis do run much cooler (Core around 30 Degree and Core2 "much less overheat") Neo Core: http://www.friendlyarm.com/index.php?route=product/product&product_id=212 http://wiki.friendlyarm.com/wiki/index.php/NanoPi_NEO_Core Neo Core2: http://www.friendlyarm.com/index.php?route=product/product&product_id=211 http://wiki.friendlyarm.com/wiki/index.php/NanoPi_NEO_Core2 On the Neo Core2 there is an option to get the Neo Core2 with soldered headers. This isnt available (at this time) NOT for the Neo Core. Doesnt seems to be a option for soldered Headers - only the standard-configuration is unsoldered but headers are included. Also at this time not available is the pictured heat sink and the Base/Docking PCB and Case The Base-Board - when developed (and why they got pictures?) - will be in the size of a Raspberry Pi3 and will fit in Raspberry Pi3 cases. No - the USB-Ports and the Audio-port is on another place [EDIT] Shield is also at this time available the same for booth Core models at the price of $9,98 http://www.friendlyarm.com/index.php?route=product/product&product_id=213 - case (formfactor NanoPi K2) is included - screw for the M2-SSD is included - the serial debug-port is at the place of the HDMI-Port. - the M2-SSD Port now seems to have full lenght - no more need for a half-size board Old HATs for the "normal" NanoPi Neo & Neo2 will fit to the Core models (OLED, Arduino and PCM5102A-Audio-Hat) but I think then you could close the case
-
On Nanopi Neo Core 2 LTS (Allwiner H5) : - Armbian Stretch stock : speedtest Down:90Mb/s Up:80Mb/s - Armbian Buster stock : speedtest Down:90Mb/s Up:4Mb/s Maybe regression in network drive ? I was not able to find any information on this issue ... Could you help me please ?
-
Greetings all. I am having no success getting access to gpio pins in NR using opi-gpio. I am trying to re-build a system that I messed up due to an update. The update broke access to the 1-wire host adapter I had running on I2C. I have searched and read a lot trying to find a solution but I am not making enough sense of the solutions I read to even know if they apply or if I am applying them correctly. Very frustrating because I had this working once but that was a number of versions ago for both armbian and NR. Also, the gpio pins were working even after the I2c update. In the process of 'fixing' that I started over with current armbian: millheim@Millheim:~$ Linux Millheim 4.19.63-sunxi64 #5.92 SMP Fri Aug 2 00:18:27 CEST 2019 aarch64 GNU/Linux and node red 1.0.2. Once running, I copied the backup I made of the flow and have most things working as I had them before. The main thing that I cannot get working is GPIO. I decided to try to use an approach that duplicates as closely as possible another system I have running which is a Nanopi Neo Core 2 LTS. The board I am trying to get working is a Nanopi Neo 2. I flashed the corresponding image, selected docker and hassio (hassio was false start and am not using it). I then pulled official current NR and now have NR flow working except for access to gpio. It looks to me like the docker container isn't getting access to the gpio. I cannot figure out what I need to do here. When it comes to giving the correct permissions, I want to use good practice but don't think I need to be retentive and only give access to the 3 pins I am using at the moment. I am looking for a solution that will allow me to access the pins, interrupts, etc. shown in gpio readall without having to fiddle with this issue repeatedly. This iteration: docker run -it -p 1880:1880 --device=/dev/gpiochip0 --device=/dev/gpiochip1 -v /home/millheim/.node-red/data:/data --name nodered nodered/node-red Gives this error: 17 Nov 03:39:24 - [info] Starting flows 17 Nov 03:39:24 - [info] [opi_out:Pin 24 - PC3] Pin: 67 17 Nov 03:39:24 - [error] [opi_out:9f074a4f.c5db88] Error: EACCES: permission denied, open '/sys/class/gpio/export' 17 Nov 03:39:24 - [info] [opi_out:Pin 23 - PC2] Pin: 66 17 Nov 03:39:24 - [error] [opi_out:526f3769.6171f8] Error: EACCES: permission denied, open '/sys/class/gpio/export' 17 Nov 03:39:24 - [info] [opi_out:Pin 21 - PC1] Pin: 65 17 Nov 03:39:24 - [error] [opi_out:acccfc03.277b9] Error: EACCES: permission denied, open '/sys/class/gpio/export' 17 Nov 03:39:24 - [info] Started flows My user is member of group gpio. It is probably clear to others (barely to me) NR does run this way and does communicate with owserver. There are errors thrown but only because only one sensor is present. Others aren't connected. /etc/rc.local has this: sudo chown root:gpio /sys/class/gpio/unexport /sys/class/gpio/export sudo chmod 220 /sys/class/gpio/unexport /sys/class/gpio/export exit 0 /etc/udev/rules.d/99-com.rules has this: # KERNEL=="gpio*", RUN="/bin/sh -c 'chgrp -R gpio /sys/%p /sys/class/gpio && chmod -R g+w /sys/%p /sys/class/gpio'" # SUBSYSTEM=="gpio*", PROGRAM="/bin/sh -c 'chown -R root:gpio /sys/class/gpio && chmod -R 770 /sys/class/gpio; chown -R root:gpio /sys/devices/virtual/gpio && chmod -R 770 /sys/devices/virtual/gpio'" SUBSYSTEM=="gpio*", PROGRAM="/bin/sh -c 'find -L /sys/class/gpio/ -maxdepth 2 -exec chown root:gpio {} \; -exec chmod 770 {} \; || true'" Output of armbianmonitor -u: https://drive.google.com/open?id=1Xfu8YhRqs1OCbWmSoMbsP4VvBEhGgbyv I doubt this will be terribly helpful but just in case millheim@Millheim:~$ gpio readall +-----+-----+----------+------+---+-NanoPi-NEO2--+------+----------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | | | 3.3V | | | 1 || 2 | | | 5V | | | | 12 | 8 | GPIOA12 | ALT5 | 0 | 3 || 4 | | | 5V | | | | 11 | 9 | GPIOA11 | ALT5 | 0 | 5 || 6 | | | 0v | | | | 203 | 7 | GPIOG11 | OFF | 0 | 7 || 8 | 0 | OFF | GPIOG6 | 15 | 198 | | | | 0v | | | 9 || 10 | 0 | OFF | GPIOG7 | 16 | 199 | | 0 | 0 | GPIOA0 | OFF | 0 | 11 || 12 | 0 | OFF | GPIOA6 | 1 | 6 | | 2 | 2 | GPIOA2 | OFF | 0 | 13 || 14 | | | 0v | | | | 3 | 3 | GPIOA3 | OFF | 0 | 15 || 16 | 0 | OFF | GPIOG8 | 4 | 200 | | | | 3.3v | | | 17 || 18 | 0 | OFF | GPIOG9 | 5 | 201 | | 64 | 12 | GPIOC0 | OFF | 0 | 19 || 20 | | | 0v | | | | 65 | 13 | GPIOC1 | OFF | 0 | 21 || 22 | 0 | OFF | GPIOA1 | 6 | 1 | | 66 | 14 | GPIOC2 | OFF | 0 | 23 || 24 | 0 | OFF | GPIOC3 | 10 | 67 | +-----+-----+----------+------+---+----++----+---+------+----------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+----------+------+---+-NanoPi-NEO2--+------+----------+-----+-----+ +-----+----NanoPi-NEO2 USB/Audio-+----+ | BCM | wPi | Name | Mode | V | Ph | +-----+-----+----------+------+---+----+ | | | 5V | | | 25 | | | | USB-DP1 | | | 26 | | | | USB-DM1 | | | 27 | | | | USB-DP2 | | | 28 | | | | USB-DM2 | | | 29 | | | | IR-RX | | | 30 | | 17 | 19 | GPIOA17 | OFF | 0 | 31 | | | | PCM/I2C | | | 32 | | | | PCM/I2C | | | 33 | | | | PCM/I2C | | | 34 | | | | PCM/I2C | | | 35 | | | | 0V | | | 36 | +-----+-----+----------+------+---+----+ +-----+----NanoPi-NEO2 Debug UART-+----+ | BCM | wPi | Name | Mode | V | Ph | +-----+-----+----------+------+---+----+ | 4 | 17 | GPIOA4 | ALT5 | 0 | 37 | | 5 | 18 | GPIOA5 | ALT5 | 0 | 38 | +-----+-----+----------+------+---+----+ Thanks for taking the time to look through this. Hope you can help. Q
-
 I tested with Armbian Stretch image on NanoPi-NEO-Core2. PJSIP VoIP Client. MIC input does not work. Additional USB sound cards work well. In FriendelyARM original firmware, MIC input works well. I hope that this issue will be resolved. Please help me.
I tested with Armbian Stretch image on NanoPi-NEO-Core2. PJSIP VoIP Client. MIC input does not work. Additional USB sound cards work well. In FriendelyARM original firmware, MIC input works well. I hope that this issue will be resolved. Please help me. -
Hi I would like to ask you can I connect my NanoPi Neo Core 2 (Armbian) with LCD TFT 3.2 (320x240)px by GPIO and SPI. RPi driver module LCD-show is nor response and don,t work. Anybody has experience or know how to do that. Is it possible.
-
Hi I have strange problem with my nano pi neo core 2. The device was working a few days then suddenly I lost my ssh connection. I used serial port to communication to see what happened and I get reply below. The last line it is a Error so I should reset my device. I did it several times and the result is the same. I'm not specialist but I supposed it is something wrong with eMMC memory because if I insert SD card with armbian it starts normally. Anyone have idea what was that, what happened. My nano pi shows week light of red LED. U-Boot SPL 2018.11-armbian (Feb 08 2019 - 11:05:25 +0100) DRAM: 1024 MiB Trying to boot from MMC2 NOTICE: BL31: v2.0(debug):30490b1 NOTICE: BL31: Built : 19:11:09, Feb 6 2019 NOTICE: BL31: Detected Allwinner H5 SoC (1718) NOTICE: BL31: Found U-Boot DTB at 0x40843b8, model: FriendlyARM NanoPi NEO Core 2 INFO: ARM GICv2 driver initialized INFO: Configuring SPC Controller NOTICE: BL31: PMIC: Defaulting to PortL GPIO acorrding to H5 reference design INFO: BL31: Platform setup done INFO: BL31: Initializing runtime services INFO: BL31: cortex_a53: CPU workaround for 855873 was applied INFO: BL31: Preparing for EL3 exit to normal world INFO: Entry point address = 0x4a000000 INFO: SPSR = 0x3c9 U-Boot 2018.11-armbian (Feb 08 2019 - 11:05:25 +0100) Allwinner Technology CPU: Allwinner H5(SUN50I) Model: FriendlyARM NanoPi NEO Core 2 DRAM: 1 GiB MMC: SUNXI SD/MMC: 0 ,SUNXI SD/MMC:1 Loading Enviroment from EXT4... MMC: no card present In: serial Out: serial Err: serial Net: No ethernet found. MMC: no card present MMC: no card present starting USB... USB0: USB EHCI 1.00 USB1: USB OHCI 1.0 scanning bus 0 for devices... 1 USB Device(s) found scanning us for storage devices... 0 Storage Device(s) found Autoboot in 1 second, press <Space> to stop swich to partitions #0, OK mmc1(part 0) is current device Scanning mmc 1:1... Found U-Boot script /boot/boot.src 3042 bytes read in 7 ms (423.8 KiB/s) ## Executing script at 4fc00000 U-boot loaded from eMMC or secondary SD Boot script loaded from mmc 5080090 bytes read in 28 ms (17.3 MiB/s) MMC: no card present 28982 bytes read in 15 ms (1.8 MiB/s) 374 bytes read in 14 ms (25.4 KiB/s) Applying kernel provided DT overlay sun50i-h5-i2c0.dtbo 374 bytes read in 14 ms (25.4 KiB/s) Applying kerenl provided DT overaly sun50i-h5-i2c1.dtbo 502 bytes read in 16 ms (30.3 KiB/s) Applying kernel provided DT overlay sun50i-h5-uart1.dtbo 777 bytes read in 19 ms (39.1 KiB/s) Applying kernel provided DT overlay sun50i-h5-w1-gpio.dtbo 4155 bytes read in 14 ms (289.1 KiB/s) Applying kernel provided DT fixup script (sun50i-h5-fixup.scr) ## Executing script at 44000000 tmp_bank=A tmp_pin=1 5328003 bytes read in 268 ms (19 MiB/s) 14243848 bytes read in 702 ms (19.4 MiB/s) ## Loading init Ramdisk from Legacy Image at 4fe00000 ... Image Name: uInitrd Image Type: AArch64 Linux RAMDisk Image (gzip compressed) Data Size: 5327939 Bytes = 5.1 MiB Load Address: 00000000 Entry Point: 00000000 Veryfying Checksum ... OK ## Flattend Device Tree blob at 4fa00000 Booting using the fdt blob at 0x4fa00000 EHCI failed to shut down host controller. Loading Ramdisk to 49aeb000, end 49fffc43 ... OK reserving fdt memory region: addr=4fa00000 size=6d000 Lading Device Tree to 0000000049a7b00, end 0000000049aeaff ... OK WARNING: could not set bootargs FDT_ERR_NOSPACE. ERROR: /chosen node create failed -must RESET the board to recover FDT creation failed! hanging...### ERROR ### Please RESET the board ###
-
Hi I would like to ask you how to use MAX485 module to communicate 2 NanoPi Neo Core 2. I would like to use UART0 (it is GPIO4 and 5). I connection my module similar to this picture: https://www.google.com/search?q=max+485&client=ubuntu&hs=ern&channel=fs&tbm=isch&source=iu&ictx=1&fir=FN56jmGIPP4yJM%3A%2CBP52RgiAvdjG4M%2C_&vet=1&usg=AI4_-kQK1TQEVXzv7J4_kJ8nEnLbgH0X5w&sa=X&ved=2ahUKEwjxy57J2oHhAhVpsosKHZTnCnAQ9QEwBHoECAUQDA#imgrc=Jkfuqm9JL_mJXM:&vet=1 I wrote python3 code send.py : import RPi.GPIO as GPIO import time import serial import os EN_485 = 24 GPIO.setmode(GPIO.BOARD) GPIO.setup(EN_485,GPIO.OUT) print("Test1") send_str = input("Wiadomosc testowa 123123123") ser = serial.Serial(port='/dev/ttyS0',baudrate =115200,bytesize=8,stopbits=1,timeout=1) last_time = time.time() print("Test2") now_time = time.time() GPIO.output(EN_485,True) time.sleep(0.01) n = 80 try: while n>0: ser.write(send_str) n=n-1 time.sleep(0.5) print(n) except KeyboardInterrupt: GPIO.output(EN_485,False) But when I started program it 'freeze' on the line ser=serial.Serial(port[...]). So it print only "Test1" and waiting. Maybe someone have any idea why this program stop and waiting in this line?
-
Hi. I would like to ask you how to add and read temperature and humidity from sensor DHT11 on Nano Pi Neo Core 2 with armbian. I want to use PA13 pin (CS form SPI1) I try to enable overlay: sudo modprobe dht11 cat /sys/bus/iio/devices/iio:device0/in_temp_sclae return : -119 When I try add dht11 to overlay in /boot/armbianEnv.txt this module after reboot is still disable. Any suggestions?
-
Hi everyone. I have nano pi neo core 2 with ARMBIAN 5.75 stable Debian GNU/Linux 9 (stretch) 4.19.20-sunxi64. I try to change i2c speed from 100 000 to 400 000. I try: sudo fdtput -t i sun50i-h5-nanopi-neo-core2.dtb i2c0 clock-frequency 400000 Error at 'i2c0': FDT_ERR_BADPATH Anyone have idea how to change i2c speed?
-
I will describe my problem with NanoPi Neo Core2: I installed the system on eMMc I installed WiringNP I installed the USB drive Everything worked, also Putty via USB I wanted to connect the external module via SPI. The module requires setting the transfer frequency to 20 MHz. I decided to look at the file sun50i-h5-nanopi-neo-core2.dtb . For this purpose, I decompiled to a file . dts . Due to late night time I made a cardinal error, that is before these activities I did not copy the file . dtb I just played on the operating system. After the power is turned off NanoPi and the next day the system is not raised. Red power LED is lit green while not depicted close. Router does not see NanoPi and was obviously seen. Replacing the power supply did not help. I recorded the system card ( DietPi , Armbian , FriendlyElec ) . After inserting into NanoPi the system also did not start. I tried different combinations: start with ethernet and without, with putty (serial), with different SD cards and nothing. I read on the forum that NanoPi with the H3 processor always tests the presence of an SD card in the first place and if it is in the bootable version it starts the system from it. Probably NanoPi Neo Core2 with H5 processor this rule does not apply. Please help me solve the problem of SETTING UP BOOT FROM SD CARD !
-
Greetings to all, Preamble: Thanks to all that have worked to make the Armbian project what it is today. It is greatly appreciated! I have done numerous hours of reading and searching (due diligence). I know I could run a benchmarks and all but that means even more delay reaching the objective. Some brief guidance from those who have gone before would save a lot of time and would be greatly appreciated. Looking at the datasheets wasn't real helpful in guesstimating optimum performance configuration - especially since there are so many other factors that have an impact. Background: My objective is to achieve a reliable, long life system and avoid big performance hits along the way. The host is for home automation so the most of the storage activity will be logging and playing back canned sounds and serving up web pages consistent with HMI functions by my estimation. Other activity will be from Node-Red, MQTT broker, The automation web server, etc. I also maintain a NAS in the house so logs backups and databases associated with the HA system will be copied or backed up there. I have done so much reading and a fair bit of testing that I am a bit unsure as I write if Armbian supports logging to ramdisk or some such. If so, this would also be part of the picture for me. I would either sense the UPS power state or come up with a supercap or other power storage scheme and sense power loss and push ramdisk to NV storage... This is a little off topic but is relevant to the extent that I don't want to loose data that has been collected and the safest place for it is not in ram but in flash. I am guessing that for this context with a limited number (15?) of devices connected to via browser such as tablets, phones, and PCs alongside a few dozen other devices that are I/O nodes, not a lot of disk I/O will be needed. Room for growth is important (I hope) as well as avoiding performance degradation as a consequence of it. It is troublesome to have to deal with 'users' noticing slowdowns! Though of course I wouldn't consider hobbling the system now and loosening the reins later to deal with extra load... As I see it, if I use eMMC at all, I need to be using some kind of wear leveling (f2fs), minimize writes to it, and don’t fill it too full. A better option if performance will allow is to use sda1 instead for the root file system. I assume the M.2 device will have wear leveling and other features which along with much larger capacity (largely empty) in concert with brtfs file system is the best I can do to get performance and reliable operation over the M.2 /USB interface. Since M.2 is replaceable it is reasonable to expect that the system will not become permanently unusable due to flash wear failures in the near and mid term - I can simply restore to new M.2 device if it fails. Long term fiscal and technology issues are another matter. Question 1: Which would yield a more responsive system? The os residing on the eMMC or M.2? I see that the eMMC is using an 8 bit parallel interface (data and address must be using same path) vs the M.2 slot which is connected via a JMS567-LGBB1A chip. I read here https://forum.armbian.com/topic/1925-some-storage-benchmarks-on-sbcs/?do=findComment&comment=51350 that it at least has the potential to be a good performer. The context there was USB3 which is not used on the FA shield. The shield uses USB2 so there is still some question about how it will perform (there are other factors as well of course). Question 2: If I end up using eMMC for root, and assuming logs are being written to m.2, what recommendations to monitor and make sure writes to eMMC are minimized? I would probably want to do some monitoring anyway later on for lots of reasons. Pointers on how to set up brtfs (f2fs as well actually) for root to maintain speed and health in this context would also be appreciated. Regards and thanks again to all that have and will contribute, Q
-
 Greetings all, See my last post in thread for method I found to get around issues. EDIT: This may be limited to is an apt issue DNS seems ok after all. Use nmtui to edit network config not armbian-config None of what follows should be taken as complaining. I am only trying to get some help, give some observations from a non-expert viewpoint and possibly help ID a bug. Not being an expert, I am looking for confirmation. I am trying to get the NanoPi NEO core-2 LTS set up and am having some issues with apt. I haven't gone past that because the first thing after getting properly booting install (for me anyway) is to install webmin. This makes it relatively easier for me to have visibility into the system, edit config files etc. etc. My /etc/apt/sources.list seems to be correct but when I do apt install webmin I get "no candidate". on another system running Linux 4.14.0 on aarch64 (also a FA NanoPi NEO2 (+) variant, the webmin package is there. apt clean, apt update, apt --fix-broken install have all been done. I changed to GB sources in armbian config utility but that domain wasn't responding. The other system is using dietpi, is on the same network, uses an identical sources.list (for all intents) and works fine. This is what lead me eventually to look at DNS and network as possible causes. Using armbian-config, I set my system up with static IP and if I found a place to enter dns I use 1.1.1.1 and 1.0.0.1 (I don't use domain names inside my network) . I couldn't find a place to do that. If I ping google.com from command line on NEO, it works. If I ping google.com I get a response. if I ping nasa.gov I don't (more later).EDIT: This was a bad ping target. I wasn't watching closely enough to see that dns resolved the IP and that the IP is what gets pinged directly. I learned something today! I tried editing nano /etc/NetworkManager/NetworkManager.conf and replacing dns=default with dns=none and then putting entry for 1.1.1.1 in my resolve.conf. to no avail. domain names are working for the rest of my network so I am inclined to think something is wrong with this particular system. I do not use IPv6 so I opted to turn that off in armbian-config (I don't understand why apt and IPv6 are associated). Again, IPv4 static IP, correct gateway IP, correct mask, and I could find no option to enter DNS servers. Wifi is not in use Wired does work at least a little (I can ping google). But beyond that I am not confident in the state of the network configuration. When selecting clear network interfaces I did see DNS masquerading option not loaded error. It is not clear to me if that is important. I also went to "advanced|edit /etc/network/interfaces and the file shown has no entry for eth0 but does have an comment "#Network is managed by Network manager" along with the local loopback entries. There seems to be an issue with the armbian-config menu system (at least in my mind) in that when selecting an action, the only route back from any action is to cancel. This is not optimal - or I am missing something here? For some menu items the current status of the item is displayed as part of the menu (enabled vs disabled) for others, it is not and when you select the menu item (select static vs dynamic) the screen refreshes to show enable and disable options but does not indicate the current state. Cancel does what in that case? Also, I tried reverting to dhcp and leaving IPv6 disabled as indicated in config menu. After reboot IPv6 address is present in Ifconfig (below)! Still disabled in Armbian-config. Toggling IPv6 does remove IPv6 address from ifconfig but only 'till reboot. Disable does not survive reboot. Regardless of presence of IPv6 address, I am unable to ping nasa.gov but can ping google.com. Again, both visible from other devices on my network. not working eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500 inet 192.168.1.114 netmask 255.255.255.0 broadcast 192.168.1.255 inet6 fe80::XXXX:YYYY:1cc:1220 prefixlen 64 scopeid 0x20<link> # I mangled address ether MAC REMOVED txqueuelen 1000 (Ethernet) RX packets 1729 bytes 185731 (181.3 KiB) RX errors 0 dropped 0 overruns 0 frame 0 TX packets 169 bytes 14605 (14.2 KiB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0 device interrupt 24 Working Nano eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500 inet 192.168.1.149 netmask 255.255.255.0 broadcast 192.168.1.255 ether MAC REMOVED txqueuelen 1000 (Ethernet) RX packets 4295815 bytes 468858671 (447.1 MiB) RX errors 0 dropped 2467577 overruns 0 frame 0 TX packets 38465 bytes 22491765 (21.4 MiB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0 device interrupt 28 Seems like there are two separate but closely related issues here. Control over IPv6 and DNS. With a third less critical being ambiguous configuration menu functions and display. Thanks for taking the time to read this far. Hope you can help. Q
Greetings all, See my last post in thread for method I found to get around issues. EDIT: This may be limited to is an apt issue DNS seems ok after all. Use nmtui to edit network config not armbian-config None of what follows should be taken as complaining. I am only trying to get some help, give some observations from a non-expert viewpoint and possibly help ID a bug. Not being an expert, I am looking for confirmation. I am trying to get the NanoPi NEO core-2 LTS set up and am having some issues with apt. I haven't gone past that because the first thing after getting properly booting install (for me anyway) is to install webmin. This makes it relatively easier for me to have visibility into the system, edit config files etc. etc. My /etc/apt/sources.list seems to be correct but when I do apt install webmin I get "no candidate". on another system running Linux 4.14.0 on aarch64 (also a FA NanoPi NEO2 (+) variant, the webmin package is there. apt clean, apt update, apt --fix-broken install have all been done. I changed to GB sources in armbian config utility but that domain wasn't responding. The other system is using dietpi, is on the same network, uses an identical sources.list (for all intents) and works fine. This is what lead me eventually to look at DNS and network as possible causes. Using armbian-config, I set my system up with static IP and if I found a place to enter dns I use 1.1.1.1 and 1.0.0.1 (I don't use domain names inside my network) . I couldn't find a place to do that. If I ping google.com from command line on NEO, it works. If I ping google.com I get a response. if I ping nasa.gov I don't (more later).EDIT: This was a bad ping target. I wasn't watching closely enough to see that dns resolved the IP and that the IP is what gets pinged directly. I learned something today! I tried editing nano /etc/NetworkManager/NetworkManager.conf and replacing dns=default with dns=none and then putting entry for 1.1.1.1 in my resolve.conf. to no avail. domain names are working for the rest of my network so I am inclined to think something is wrong with this particular system. I do not use IPv6 so I opted to turn that off in armbian-config (I don't understand why apt and IPv6 are associated). Again, IPv4 static IP, correct gateway IP, correct mask, and I could find no option to enter DNS servers. Wifi is not in use Wired does work at least a little (I can ping google). But beyond that I am not confident in the state of the network configuration. When selecting clear network interfaces I did see DNS masquerading option not loaded error. It is not clear to me if that is important. I also went to "advanced|edit /etc/network/interfaces and the file shown has no entry for eth0 but does have an comment "#Network is managed by Network manager" along with the local loopback entries. There seems to be an issue with the armbian-config menu system (at least in my mind) in that when selecting an action, the only route back from any action is to cancel. This is not optimal - or I am missing something here? For some menu items the current status of the item is displayed as part of the menu (enabled vs disabled) for others, it is not and when you select the menu item (select static vs dynamic) the screen refreshes to show enable and disable options but does not indicate the current state. Cancel does what in that case? Also, I tried reverting to dhcp and leaving IPv6 disabled as indicated in config menu. After reboot IPv6 address is present in Ifconfig (below)! Still disabled in Armbian-config. Toggling IPv6 does remove IPv6 address from ifconfig but only 'till reboot. Disable does not survive reboot. Regardless of presence of IPv6 address, I am unable to ping nasa.gov but can ping google.com. Again, both visible from other devices on my network. not working eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500 inet 192.168.1.114 netmask 255.255.255.0 broadcast 192.168.1.255 inet6 fe80::XXXX:YYYY:1cc:1220 prefixlen 64 scopeid 0x20<link> # I mangled address ether MAC REMOVED txqueuelen 1000 (Ethernet) RX packets 1729 bytes 185731 (181.3 KiB) RX errors 0 dropped 0 overruns 0 frame 0 TX packets 169 bytes 14605 (14.2 KiB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0 device interrupt 24 Working Nano eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500 inet 192.168.1.149 netmask 255.255.255.0 broadcast 192.168.1.255 ether MAC REMOVED txqueuelen 1000 (Ethernet) RX packets 4295815 bytes 468858671 (447.1 MiB) RX errors 0 dropped 2467577 overruns 0 frame 0 TX packets 38465 bytes 22491765 (21.4 MiB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0 device interrupt 28 Seems like there are two separate but closely related issues here. Control over IPv6 and DNS. With a third less critical being ambiguous configuration menu functions and display. Thanks for taking the time to read this far. Hope you can help. Q -
Preamble: I have done numerous hours of reading and searching (due diligence). See end. I have a FA NanoPi NEO Core-2 LTS with shield and 64G M.2 (This shield uses JMS567-LGBB1A chip USB to sata for M.2 access). I have successfully installed Armbian from SD to and booted from the eMMC. Armbian Stretch mainline kernel 4.14.y - This image https://dl.armbian.com/nanopineocore2/Debian_stretch_next.7z armbianmonitor -u results http://ix.io/1xAA Logs indicate formatting did occur correctly as far as I can tell. The volumes are formatted as I selected - along with an 'extra' ext4 volume that looks like it is just for boot. NOTE: Since I could not boot, I re-tried using default ext4 for both which works. System now boots Armbian without TF. ATM OS resides on sda1. Console output: INFO: PSCI Affinity Map: INFO: AffInst: Level 0, MPID 0x0, State ON INFO: AffInst: Level 0, MPID 0x1, State ON INFO: AffInst: Level 0, MPID 0x2, State ON INFO: AffInst: Level 0, MPID 0x3, State ON U-Boot SPL 2018.05-armbian (Oct 27 2018 - 08:32:18 +0200) DRAM: 1024 MiB Trying to boot from MMC2 NOTICE: BL3-1: Running on H5 (1718) in SRAM A2 (@0x44000) NOTICE: Configuring SPC Controller NOTICE: BL3-1: v1.0(debug):c9f55c0 NOTICE: BL3-1: Built : 08:32:12, Oct 27 2018 NOTICE: DT: sun50i-h5-nanopi-neo-core2 NOTICE: SCPI: dummy stub handler, implementation level: 000000 INFO: BL3-1: Initializing runtime services INFO: BL3-1: Preparing for EL3 exit to normal world INFO: BL3-1: Next image address: 0x4a000000, SPSR: 0x3c9 U-Boot 2018.05-armbian (Oct 27 2018 - 08:32:18 +0200) Allwinner Technology CPU: Allwinner H5 (SUN50I) Model: FriendlyARM NanoPi NEO Core 2 DRAM: 1 GiB MMC: SUNXI SD/MMC: 0, SUNXI SD/MMC: 1 Loading Environment from EXT4... MMC: no card present ** Bad device mmc 0 ** Failed (-5) In: serial Out: serial Err: serial Net: No ethernet found. MMC: no card present ** Bad device mmc 0 ** MMC: no card present ** Bad device mmc 0 ** starting USB... USB0: USB EHCI 1.00 USB1: USB OHCI 1.0 scanning bus 0 for devices... 1 USB Device(s) found scanning usb for storage devices... 0 Storage Device(s) found Autoboot in 1 seconds, press <Space> to stop switch to partitions #0, OK mmc1(part 0) is current device Scanning mmc 1:1... Found U-Boot script /boot/boot.scr 3090 bytes read in 4 ms (753.9 KiB/s) ## Executing script at 4fc00000 U-boot loaded from eMMC or secondary SD Boot script loaded from mmc 208 bytes read in 2 ms (101.6 KiB/s) MMC: no card present ** Bad device mmc 0 ** 30102 bytes read in 11 ms (2.6 MiB/s) 504 bytes read in 17 ms (28.3 KiB/s) Applying kernel provided DT overlay sun50i-h5-usbhost1.dtbo 504 bytes read in 14 ms (35.2 KiB/s) Applying kernel provided DT overlay sun50i-h5-usbhost2.dtbo 4179 bytes read in 13 ms (313.5 KiB/s) Applying kernel provided DT fixup script (sun50i-h5-fixup.scr) ## Executing script at 44000000 4923549 bytes read in 247 ms (19 MiB/s) 13148168 bytes read in 649 ms (19.3 MiB/s) ## Loading init Ramdisk from Legacy Image at 4fe00000 ... Image Name: uInitrd Image Type: AArch64 Linux RAMDisk Image (gzip compressed) Data Size: 4923485 Bytes = 4.7 MiB Load Address: 00000000 Entry Point: 00000000 Verifying Checksum ... OK ## Flattened Device Tree blob at 4fa00000 Booting using the fdt blob at 0x4fa00000 Loading Ramdisk to 49b4d000, end 49fff05d ... OK reserving fdt memory region: addr=4fa00000 size=6d000 Loading Device Tree to 0000000049add000, end 0000000049b4cfff ... OK Starting kernel ... Loading, please wait... starting version 232 Begin: Loading essential drivers ... done. Begin: Running /scripts/init-premount ... done. Begin: Mounting root file system ... Begin: Running /scripts/local-top ... done. Begin: Running /scripts/local-premount ... Scanning for Btrfs filesystems done. Begin: Will now check root file system ... fsck from util-linux 2.29.2 done. mount: Invalid argument done. Begin: Running /scripts/local-bottom ... done. Begin: Running /scripts/init-bottom ... mount: No such file or directory mount: invalid option -- done. mount: No such file or directory run-init: current directory on the same filesystem as the root: error 0 Target filesystem doesn't have requested /sbin/init. run-init: current directory on the same filesystem as the root: error 0 run-init: current directory on the same filesystem as the root: error 0 run-init: current directory on the same filesystem as the root: error 0 run-init: current directory on the same filesystem as the root: error 0 run-init: current directory on the same filesystem as the root: error 0 No init found. Try passing init= bootarg. Rebooting automatically due to panic= boot argument To elaborate on the process, after writing TF card and booting, I ran armbian-config selecting option "eMMC boot | USB/SATA/NVMe root install" and selected format of btrfs for sda1. Also, "Select filesystem type for eMMC /dev/mmcblk2" ... "Formating /dev/mmcblk2 to f2fs ... please wait". The utility responded with the appropriate warnings (about erasing/formatting) and appeared to execute correctly, returning no errors and prompting for reboot at end of process. I shutdown, removed card, powered up and system did not come up properly. I saw no special advisories about additional manual steps etc. Question: Did I miss a step when using the alternative disk format options on this platform? Are they a WIP? Should I file a bug report? 'Bibliography:' https://docs.armbian.com/User-Guide_Getting-Started/ https://docs.armbian.com/User-Guide_Armbian-Config/ Nearly all NanoPi NEO2 forum posts here Many others...
-
[H5: Nanopi neo core 2] I observe the UART Rx line to be influenced by the RTS line which I am using during sending. Is there a way to enable an internal pull-up on Rx so that this doesn't happen? I suspect it's the cause of communication errors that I observe. I confess that I am currently on a FriendlyCore 4.16 build, but I wouldn't expect such an issue to be too distribution-specific.
-
Hi guys, I am trying to install `ARMBIAN 5.38 stable Debian GNU/Linux 9 (stretch) 4.14.14-sunxi64` to the internal MMC with `nand-sata-install` but it seems that the internal MMC is not available after booting from SD. I tried to set the `sdc_detmode` as described here: https://forum.armbian.com/topic/1702-orange-pi-plus-2e-where-is-16ghz-and-sd/?tab=comments#comment-13163 But there is no `script.bin`. Any idea on how to flash the internal MMC on a Neo Core 2? Cheers! Robert
-
I built Armbian_5.59_Nanopineocore2_Ubuntu_xenial_next_4.17.17.img for my board, and am trying to add an overlay dtb that describes a port expander I have on i2c2. $ sudo armbian-add-overlay ./mcp23008.dts Error: dtc does not support compiling overlays Please try to install matching kernel headers
-
Hy Just installed the Armbian Bionic image. Tried to attach different usb devices but they did not got registered. So I tried to look at the settings under Hardware in den armbian-config but it's gone.... I remember in the Armbian Stretch build it was Variable... Can someone help me Andy
-
I have installed Armbian_5.38_Nanopineo2_Debian_stretch_next_4.14.14.7z on NanoPINeo Core2 H5. Welcome to ARMBIAN 5.38 stable Debian GNU/Linux 9 (stretch) 4.14.0 uname -a Linux ntp169992 4.14.0 #25 SMP Fri May 11 16:57:53 CST 2018 aarch64 GNU/Linux ls /lib/modules 4.14.18-sunxi64 lsmod Module Size Used by No modules are loaded modprobe tun modprobe: ERROR: ../libkmod/libkmod.c:586 kmod_search_moddep() could not open moddep file '/lib/modules/4.14.0/modules.dep.bin' modprobe: FATAL: Module tun not found in directory /lib/modules/4.14.0 It seems there is a problem in the build ?
-
Hy I'm currently trying to run a DS18B20 Temperature Sensor on the PA20 Port on my Neo Core 2. The w1_gpio und w1_therm modules are loaded but still I can't see the senors in the /sys/bus/w1/devices/ folder. (28-xxxx) Now I read in different threads to edit the FEX file in the /boot/ folder. So I would bee to first covert the script.bin to the script.fex. However I can't find any *.bin file in the /boot/ folder... So is the PA20 Port the correct 1Wire port? And how can I change this port to eg. GPIOG11 if I can't find the script.bin in the /boot/ folder? Andy


-
Hy I'm currently running the latest experimental image on my NanoPi Neo Core 2. Works great haven't had any problems with it. Now my question when does the "experimental image" state change to a "stable build"? What are the criteria? Andy