

username123
-
Posts
7 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Posts posted by username123
-
-
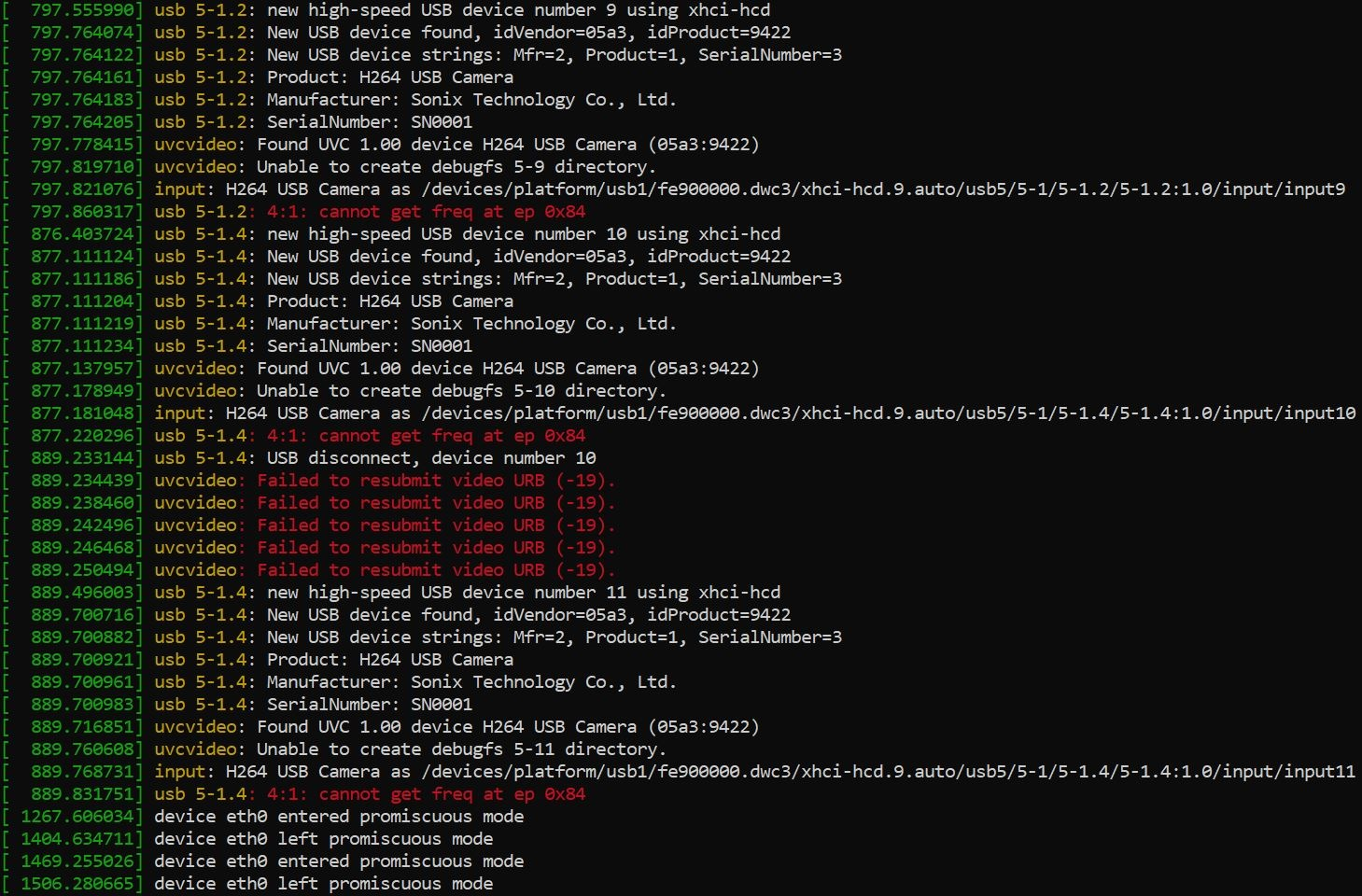
I tried starting from the lowest resolution and increased it gradually. I am able to see the livestream of all the 3 cameras up to the width x height of 384 x 288. Attached below is the dmesg that I get at that resolution with all 3 working at 100% stream quality
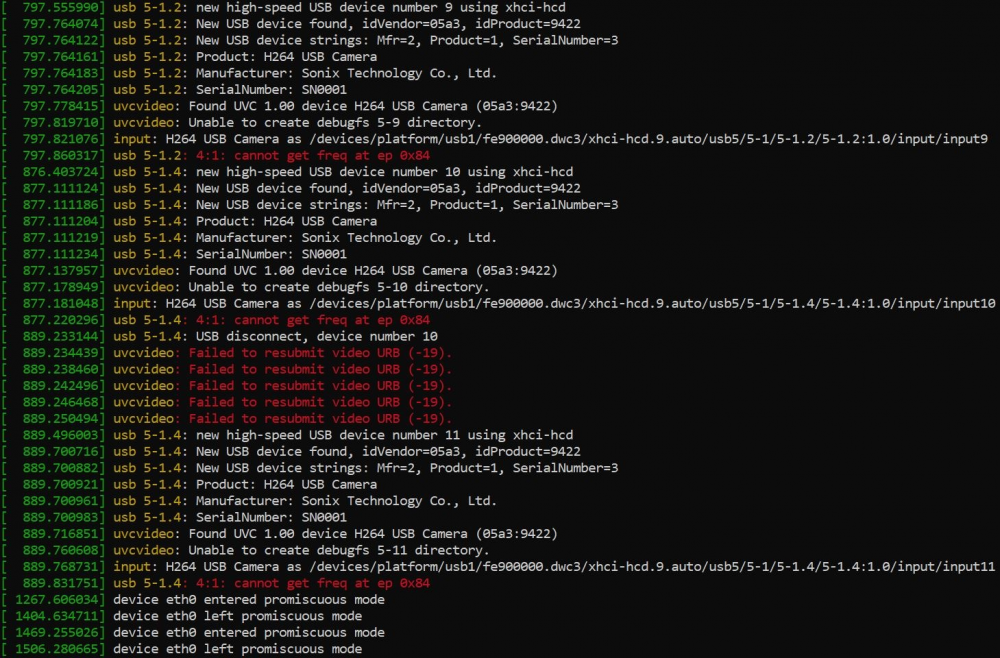
The bandwidth error is gone now
I tried to find more information about the ‘Failed to resubmit video URB (-19)’ error, but couldn’t find anything particularly useful. I would appreciate help on this
But there are a few other issues1. Is there a way for me to increase the resolution and still have the three cameras working? The stream window is really small right now, and my application requires to monitor details regarding the surroundings on it, which is proving to be difficult right now. I mean to ask if there is any other way we can reduce the bandwidth used or is it fixed and only dependent on the cameras (hardware), assuming that is the only issue here?
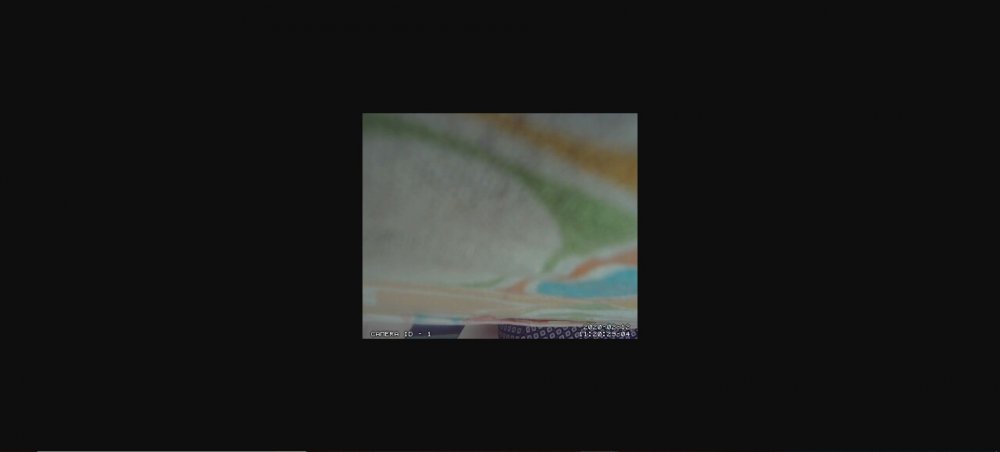
The above is the 384 x 288 stream window. As you can see, it will get difficult to make out minuter objects in the stream
2. There are times when the cameras are plugged in and the nanopi m4 reboots, that the video device of the third camera changes from video18 to video19 whereas those of camera1 and camera2 remain what they were. Can anyone point out a way to avoid this because in my application, the end user at the workstation will be unable to troubleshoot and check for video device changing every time the streams stops. -
On 2/4/2020 at 2:03 AM, TRS-80 said:
After reading this topic twice, I moved it to P2P as I suspect it will end up more likely being general software (Motion, etc.) related, rather than anything Armbian, much less hardware (RK3399) related. If I am wrong, we can move it back later...
I also use Motion (although haven't touched it lately, as for me it "just works"), but I vaguely remember something about the first config being in one file, and then second and subsequent configs thereafter being chained each in their own files after that... Have you set up your config in this way?
My motion folder has 1 motion.conf file with all the parameters set, that have to be shared by all the cameras and 3 individual files for each camera with camera specific information (includes camera id and the stream port)
Can you elaborate or show the codes regarding what you had implemented? I haven't completely understood -
I am using 3 low light HD USB cameras (details on the link below) for my application. https://bluerobotics.com/store/sensors-sonars-cameras/cameras/cam-usb-low-light-r1/
The application requires me to have all 3 cameras live streaming simultaneously on 3 different local host ports of a PC. For the controller, I am using a Nanopi M4 (it is connected to my laptop by a 20m long, CAT-6 ethernet cable)
I am using the motion package to work the cameras
I have been facing the following issues-
1. When all 3 cameras are connected to controller and stream is checked, at any given time I am able to see the livestream of only 2 of the streams. On restarting motion, any one of the hosts shows a grey screen while the other two give me the proper stream. I have tested this multiple times and would appreciate if help on how to go about this issueWe also tried connecting the cameras to my laptop directly using threads in my motion package and all the 3 streams were visible to me simultaneously
2. A few of the times the port number (seen on dev in the form - video0) have changed while the cameras have been plugged in and left as it is. If anyone has come across this problem, please tell me how you went about this
3. Attached below is a screenshot of the Tcptrack app when all three cameras were connected at 100% stream quality (set in the motion.conf file)

The first three rows represent each camera and the rates are unequal for all of them which is not expected. Can anyone help me with a possible explanation to this?
Also when that screenshot was taken, the camera streaming to localhost 8083, was showing up as a grey screen on my laptop, so what is the rate signifying?Also, to make sure there were no problems with the Nanopi M4 USB ports sourcing the current drawn by the cameras, we gave an external 5V power supply to them – We could only see any 2 out of 3 streams
I have also attached a screenshot from my Nanopi M4 Top showing the CPU usage when all three cameras were connected to stream at 100% quality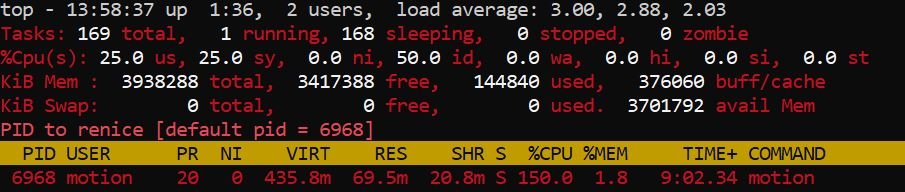
4. As a last resort, if we are only able to work 2 cameras at a time, please advise if anyone has used switching between the three cameras to choose which ones stay on at any given time
Thanks for your time -
Hi, I'm working with a nanopi m4 for the first time
I would appreciate help on how to hook up this board to my laptop
I want to install FriendlyDesktop on my laptop that has ubuntu installed in it
I'm referring to this - http://wiki.friendlyarm.com/wiki/index.php/NanoPi_M4#Get_Started
If I put the nanopi m4 zip file onto the sd card and insert it into the board, will I be able to see the Friendlydesktop start up on my laptop screen and use my laptop keyboard and touchpad as keyboard and mouse for the nanopi?
And my application requires me to work 2 cameras together on a single nanopi m4 board
Has anyone worked with 2 cameras at once on this board? How is the quality of the feed?
On the wiki forum it says I would have to reboot my board before I can see the feed. What exactly would rebooting involve? -
Thank you for the reply
Can you suggest something for the 5 to 3V conversion? I have only been able to find conversion of 5 to 3.3V -
I'm a newbie to the NanoPi M4 and haven't been able to find helpful material regarding my doubts
Any help would be appreciated
1. How do I configure the GPIO pins to function as a UART4 TX and RX pins?
2. The level signals of UART4 are of 3V but the supply to the board is 5V. All standard buck converters are of 5V to 3.3V so how would I go about that?
USB cameras with Nanopi m4 using motion package
in Beginners
Posted
I'll look into why it got disconnected on it's own
Can you advise a way to “measure” the bandwidth requirement of my USB cameras while connected to my nanopi?