Search the Community
Showing results for tags 'nanopineo3'.
Found 13 results
-
 Getting into buildroot and yocto seems a bit too much for me to get an A+B style update possibility. I would like to stick with the quality images provided by Armbian. The following applies to a NanoPi-NEO3 others SBC might have different partition layouts. From what I understood is that uboot looks for /boot in /dev/mmcblk0p1 reads the boot.cmd/scr and armbianEnv.txt and then boots the kernel accordingly. The armbianEnv.txt seems to point the kernel to the root partition using the rootdev directive. If /dev/mmcblk0p1 would now only hold /boot would it be possible to point to a different partition for the rootfs using armbianEnv.txt? If so I could imagine changing the partition layout to the following: /dev/mmcblk0: /dev/mmcblk0p1: boot partition /dev/mmcblk0p2: rootfs partitionA /dev/mmcblk0p3: rootfs partitionB /dev/mmcblk0pX: multiple more partitions that survive updates Too now allow consistency with the rootfs partitions also the boot partition directory structure would slightly change. It would contain 2 directories: /bootA, /bootB AND a hardlink /boot which either points to /bootA or /bootB In the running rootfs the fitting /boot is mounted via a bind mount hoping normal apt-get updates can deal with this. This would allow creating a rootfs by updating and verifying everything works locally and then creating an image from it. Now to OTA a relatively simple script running from rootfsA can download a new rootfs image/file structure and place it in the partition of rootfsB. Same with the new boot partition just into /bootB. The values of the armbianEnv.txt from the new boot image always point to the corresponding rootfs partition either because the image was already built for this or the script dynamically adjusts them. Same goes for fstab, machine-id, ssh identity and other rootfs specifics. The script will then verify that the write worked to avoid sd card issues. The (almost) atomic operation for switching the systems would be changing the hardlink of /boot to the /bootB directory and reboot. This idea will not detect any boot issues and revert automatically back as uboot is not involved. Also this only works if uboot is still compatible with the new boot files provided. But an additional new uboot image could also be provided during the update. Reverting can be done manually (relatively fast) by changing the hardlink back and rewriting a previously created backup copy of a might be updated uboot image. Independent of the fact that buildroot, yocto, rauc, mender… systems have a better feature set, do you think this could work?
Getting into buildroot and yocto seems a bit too much for me to get an A+B style update possibility. I would like to stick with the quality images provided by Armbian. The following applies to a NanoPi-NEO3 others SBC might have different partition layouts. From what I understood is that uboot looks for /boot in /dev/mmcblk0p1 reads the boot.cmd/scr and armbianEnv.txt and then boots the kernel accordingly. The armbianEnv.txt seems to point the kernel to the root partition using the rootdev directive. If /dev/mmcblk0p1 would now only hold /boot would it be possible to point to a different partition for the rootfs using armbianEnv.txt? If so I could imagine changing the partition layout to the following: /dev/mmcblk0: /dev/mmcblk0p1: boot partition /dev/mmcblk0p2: rootfs partitionA /dev/mmcblk0p3: rootfs partitionB /dev/mmcblk0pX: multiple more partitions that survive updates Too now allow consistency with the rootfs partitions also the boot partition directory structure would slightly change. It would contain 2 directories: /bootA, /bootB AND a hardlink /boot which either points to /bootA or /bootB In the running rootfs the fitting /boot is mounted via a bind mount hoping normal apt-get updates can deal with this. This would allow creating a rootfs by updating and verifying everything works locally and then creating an image from it. Now to OTA a relatively simple script running from rootfsA can download a new rootfs image/file structure and place it in the partition of rootfsB. Same with the new boot partition just into /bootB. The values of the armbianEnv.txt from the new boot image always point to the corresponding rootfs partition either because the image was already built for this or the script dynamically adjusts them. Same goes for fstab, machine-id, ssh identity and other rootfs specifics. The script will then verify that the write worked to avoid sd card issues. The (almost) atomic operation for switching the systems would be changing the hardlink of /boot to the /bootB directory and reboot. This idea will not detect any boot issues and revert automatically back as uboot is not involved. Also this only works if uboot is still compatible with the new boot files provided. But an additional new uboot image could also be provided during the update. Reverting can be done manually (relatively fast) by changing the hardlink back and rewriting a previously created backup copy of a might be updated uboot image. Independent of the fact that buildroot, yocto, rauc, mender… systems have a better feature set, do you think this could work? -
I have spent 7 hours now trying to connect to my Neo3 via my laptop using a USB to Ethernet Adapter. Ive also tried changing the nanopi microsd card image to see if it has any effect. from Ubuntu / Armbian / DietPi. When im powering on my Neo3, with ubuntu only the red led shows, with the other two, the Red LED shows plus the green LED flashes. Is this actually possible? Can I plug my Neo into my laptop with a ethernet usb adapter? or does it have to be into a router? The error im getting on my laptop is Connection Failed : Activation of network connection failed. the network manager shows it forever stuck on Connecting - 1000Mbps Running cmd nmcli device status returns ethernet disconnected I ran dmesg to see if there was any errors, one line read firmware: failed to load rtl_nic/rtl8153b-2.fw this error is for my usb to ethernet adapter, I fixed this by downloading rtl8153b-2.fw into /lib/firmware/rtl_nic/ and running sudo update-initramfs -u After running dmesg again, another error causing problems could be xhci_hcd 0000:00:14.0: WARN Set TR Deq Ptr cmd failed due to incorrect slot or ep state. im unable to fix this so far, I have tried changing ethernet cables, and also adding kernel parameter intel_iommu=off The error still shows in dmesg and im unable to connect to my Neo3 Any advice guys?
-
Nanopi Neo 3 is typically offered in 1GB or 2GB DDR4 RAM versions, but the RK3328 datasheet says the RK3328 can support up to 4GB If I were to source 2x 2GB of the supported types could I resolder to increase RAM? Official product page : https://www.friendlyelec.com/index.php?route=product/product&product_id=279 RK3328 Datasheet : https://rockchip.fr/RK3328 datasheet V1.2.pdf Neo3 Schematic : https://wiki.friendlyelec.com/wiki/images/a/ae/NanoPi-NEO3-2005-Schematic.pdf could anybody identify the chipname of the 2GB DDR 4 ram on the board?
-
So I was trying to compile a wifi driver for a somewhat new usb wifi device and it breaks during compilation because it expects a directory named /usr/src/<linux-headers>/arch/aarch64 but on NanoPi NEO3 the directory is named (on NanoPI R4S is the same case btw) /usr/src/<linux-headers>/arch/arm64 In order to make it work, I created a symlink under the "arch" directory called "aarch64" pointing to "arm64" and I was able to compile it. Here is what happens when I try to compile it without the symlink: pablo@callampa:~/repos/github.com/morrownr/rtl8852cu-20240510$ make clean cd phl ; rm -fr */*/*/*/*.mod.c */*/*/*/*.mod */*/*/*/*.o */*/*/*/.*.cmd */*/*/*/*.ko cd phl ; rm -fr */*/*/*.mod.c */*/*/*.mod */*/*/*.o */*/*/.*.cmd */*/*/*.ko cd phl ; rm -fr */*/*.mod.c */*/*.mod */*/*.o */*/.*.cmd */*/*.ko cd phl ; rm -fr */*.mod.c */*.mod */*.o */.*.cmd */*.ko cd phl ; rm -fr *.mod.c *.mod *.o .*.cmd *.ko cd core ; rm -fr */*.mod.c */*.mod */*.o */.*.cmd */*.ko cd core ; rm -fr *.mod.c *.mod *.o .*.cmd *.ko cd os_dep/linux ; rm -fr *.mod.c *.mod *.o .*.cmd *.ko cd os_dep ; rm -fr *.mod.c *.mod *.o .*.cmd *.ko cd platform ; rm -fr *.mod.c *.mod *.o .*.cmd *.ko rm -fr Module.symvers ; rm -fr Module.markers ; rm -fr modules.order rm -fr *.mod.c *.mod *.o .*.cmd *.ko *~ rm -fr .tmp_versions rm -fr MOK.der MOK.priv pablo@callampa:~/repos/github.com/morrownr/rtl8852cu-20240510$ make #rm -f .symvers.8852cu make ARCH=aarch64 CROSS_COMPILE= -C /lib/modules/6.6.58-current-rockchip64/build M=/home/pablo/repos/github.com/morrownr/rtl8852cu-20240510 modules make[1]: Entering directory '/usr/src/linux-headers-6.6.58-current-rockchip64' /usr/src/linux-headers-6.6.58-current-rockchip64/Makefile:768: arch/aarch64/Makefile: No such file or directory make[2]: *** No rule to make target 'arch/aarch64/Makefile'. Stop. make[1]: *** [Makefile:234: __sub-make] Error 2 make[1]: Leaving directory '/usr/src/linux-headers-6.6.58-current-rockchip64' make: *** [Makefile:723: modules] Error 2 pablo@callampa:~/repos/github.com/morrownr/rtl8852cu-20240510$ My question would be, is it correct? Shouldn't it be named "aarch64" in the first place?
-
Hi, I have a neo3 that has been running without any issues for about a year. Today after I had to restart it and the device wouldn't boot anymore. I checked the systemd logs by mounting the sd card in my laptop and I can see that it didn't get to boot at all (as there are no systemd logs after the shutdown). I checked the card for filesystem issues, and it seems to be OK. But I have no idea how to fix this. I really don't want to flash again an image and start from zero as I have a good amount of software installed that would take a lot of time to setup again. If this is a problem with the bootloader, how can I troubleshoot it? I don't have a serial interface so I am a bit in the dark here (as the neo3 doesn't have a video output, only USB and ethernet). There was another topic saying that after an upgrade, rk3328-nanopi-neo3-rev02.dtb had gone missing. I also checked that, and the file is in its place and armbianEnv.txt is pointing to it, so I don't think that is the problem. Anyway, pointers in how to debug this would be appreciated!
-
Hi Armbians :) Armbian's discontinued support of the NanoPi Neo3 board, hit me very hard. I have operated multiple of these SBCs with Armbian very stable, in different DCs for a long time. Because of the defunctional kernel under Armbian, I was forced to look around for alternatives and only came across Manjaro, DietPi and Friendlyarm published by FriendlyElec themself. Unfortunately I was not happy with Manjaro and Friendlyarm. Dietpi, on the other hand, seems to be doing quite well till now. And most importantly, it doesn't seem to have the kernel/ reboot problem that affected Armbian. But how can that be if it's based on Armbian? Can someone explain that to me?
-
Dear Armbians I have a NanoPi Neo 3 board with 1GB of RAM running in a DC for quite a while now. Because of an SD card failure, I had to make a fresh setup with the actual Bookworm image. This image seems to be quite unstable. Device is going up and down all the time. I am unable to find the problem myself. Maybe someone can take a look and help me to fix my stability issue: Debug output: https://paste.armbian.com/sozozoyahi
-
Greetings, I have multiple NanoPi NEO3s on the same subnet. When booting with Ubuntu 20.04.6 LTS they use the physical MAC address when posting to DHCP, but ARMbian seems to create a default (fake) MAC address and uses that instead. Judging by the "armbianmonitor -U" output, ARMbian knows about the physical MAC address, it just doesn't use it. The NEO3 board is listed as supported, but there is another posting dated 2020 that still seems to be unresolved. MAC address c2:1f:b3:b0:d2:41 seems to be a generic (fake) address that is being used. Is there a remedy to allow it to use the actual hardware address with this kernel ? -- -- -- bracka@NanoPi-neo3:~$ hostnamectl Static hostname: NanoPi-neo3 Icon name: computer Machine ID: 7a8f8d11a2be4919bc15a3b60d4bb717 Boot ID: af467481c9054525b978b6a316e61c94 Operating System: Debian GNU/Linux 11 (bullseye) Kernel: Linux 6.1.11-rockchip64 Architecture: arm64 bracka@NanoPi-neo3:~$ sudo ifconfig eth0 eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500 inet 192.168.1.196 netmask 255.255.255.0 broadcast 192.168.1.255 inet6 fe80::6cf0:52e7:7e44:23f8 prefixlen 64 scopeid 0x20<link> ether c2:1f:b3:b0:d2:41 txqueuelen 1000 (Ethernet) RX packets 1032591 bytes 1165880161 (1.0 GiB) RX errors 0 dropped 471 overruns 0 frame 0 TX packets 303323 bytes 43670515 (41.6 MiB) TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0 device interrupt 51 $ armbianmonitor -U 8 Thu 25 May 2023 09:48:33 PM UTC | NanoPi Neo 3 | 23.02.2 | arm64 | aarch64 | 6.1.11-rockchip64 730 ### ip addr: 731 732 1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000 733 link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00 734 inet XXX.XXX.0.1/8 scope host lo 735 valid_lft forever preferred_lft forever 736 inet6 ::1/128 scope host 737 valid_lft forever preferred_lft forever 738 2: eth0: <BROADCAST,MULTICAST> mtu 1500 qdisc noop state DOWN group default qlen 1000 739 link/ether 9a:84:df:28:e1:3e brd ff:ff:ff:ff:ff:ff 1316 ### armbian-release: 1317 1318 # PLEASE DO NOT EDIT THIS FILE 1319 BOARD=nanopineo3 1320 BOARD_NAME="NanoPi Neo 3" 1321 BOARDFAMILY=rockchip64 1322 BUILD_REPOSITORY_URL=https://github.com/armbian/build 1323 BUILD_REPOSITORY_COMMIT=1a8daf0 1324 VERSION=23.02.2 1325 LINUXFAMILY=rockchip64 1326 ARCH=arm64 1327 IMAGE_TYPE=stable 1328 BOARD_TYPE=conf 1329 INITRD_ARCH=arm64 1330 KERNEL_IMAGE_TYPE=stable 1331 BRANCH=edge 1525 ### ip addr: 1526 1527 1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000 1528 link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00 1529 inet XXX.XXX.0.1/8 scope host lo 1530 valid_lft forever preferred_lft forever 1531 inet6 ::1/128 scope host 1532 valid_lft forever preferred_lft forever 1533 2: eth0: <BROADCAST,MULTICAST> mtu 1500 qdisc noop state DOWN group default qlen 1000 1534 link/ether c2:1f:b3:b0:d2:41 brd ff:ff:ff:ff:ff:ff * I am willing to research this if somebody can provide build & submission guidelines.
-
Hi team! This may be the stupidest question ever… I am a long time Debian user. I have a project in mind where I plan to setup a dual node HA Haproxy balancer. This is pretty straightforward in Debian but I am wondering, is HAproxy even available for armbian?. I do not plan to have a big throughput for these HAproxy nodes, is for a homelab and more for fun than for production purposes… The idea is to use the cheapest dual gigabit board available, that’s why I will probably go for nanopi (which supports armbian). English is not my first language so sorry in advance for messed up wording/expressions/whatever. Thanks!
-
Because I have updated to Armbian 22.02 with the linux 5.15.25 kernel and I am using the rk3328-nanopi-r2-rev00 device tree, I thought I should share what I have discovered. 1/ I had trouble setting up a one-wire device (ds18b20 temperature sensor). I think the w1-gpio pin assigned in the supplied overlay is messing up access of the SD card. I found some helpful information from this post: https://forum.pine64.org/showthread.php ... #pid100639 I copied the overlay code, modified it to use GPIO2_A2 (pin 7 on the 26pin header), compiled it and copied the new dtbo file to "/boot/overlay-user/" . Added the "user_overlays=rockchip-w1-gpio" line to "/boot/armbianEnv.txt" and rebooted. Success. I was able to read the ds18b20. (I have since discovered the utility "armbian-add-overlay" would have done the compile, copy and edit steps all at once.) The steps I took: Overlay filename: rockchip-w1-gpio.dts /dts-v1/; /plugin/; / { compatible = "rockchip,rk3328"; fragment@0 { target-path = "/"; __overlay__ { w1: onewire@0 { compatible = "w1-gpio"; pinctrl-names = "default"; gpios = <&gpio2 2 0>; status = "okay"; }; }; }; }; You will probably need to install the device-tree-compiler. sudo apt install device-tree-compiler Compile the overlay: dtc -I dts -O dtb -o rockchip-w1-gpio.dtbo rockchip-w1-gpio.dts Copy the compiled overlay: sudo cp rockchip-w1-gpio.dtbo /boot/overlay-user/ Add the "user_overlays=rockchip-w1-gpio" line (without quotes) to "/boot/armbianEnv.txt" and reboot. I have learnt a bit more about "Device Trees" and "dt overlays" (I still don't understand how it all works), it turns out overlays can be used to change (somewhat) what has been configured in the Device Tree being used. So here are some more overlays that I have come up with after grabbing snippets from here and there. 2/ I have read of people editing and recompiling the device tree dtb file to enable the USB-OTG to be used as a "normal" USB port. I have created an overlay that changes the dr_mode of the USB-OTG from "otg" to "host". Overlay filename: rockchip-usb-otg.dts /dts-v1/; /plugin/; / { compatible = "rockchip,rk3328-usb\0rockchip,rk3066-usb\0snps,dwc2"; fragment@0 { target-path = "/usb@ff580000"; __overlay__ { dr_mode = "host"; }; }; }; Compile: dtc -@ -I dts -O dtb -o rockchip-usb-otg.dtbo rockchip-usb-otg.dts Copy the compiled overlay to /boot/overlay-user/ and add "rockchip-usb-otg" (without quotes) to /boot/armbianEnv.txt on the "user_overlays=" line. After a reboot, check by plugging a "9-hole To Dual USB2.0 Female Header Adapter Cable" (or similar) onto the USB header and plug a couple of flash drives in to the USB sockets. Type lsblk and the resulting output should show /dev/sda and /dev/sdb. 3/ The rk3328-nanopi-r2.dtb doesn't enable "pwm". PWM is handy for controlling the speed of a cooling fan. There is a header on the board for just a thing. (2Pin JST ZH 1.5mm Connector for 5V Fan) Overlay filename: rockchip-pwm-gpio.dts /dts-v1/; /plugin/; / { compatible = "rockchip,rk3328"; fragment@0 { target-path = "/pwm@ff1b0020"; __overlay__ { status = "okay"; }; }; }; Compile, copy and edit as above and reboot. ls /sys/class/pwm/ This should show "pwmchip0" is available. To be able to control "PWM" from userspace, a couple of other things need to be in place. The user needs to be a member of the "gpio" group and some udev rules need to be in place. filename: 50-pwm.rules SUBSYSTEM=="pwm*", PROGRAM="/bin/sh -c '\ chown -R root:gpio /sys/class/pwm && chmod -R 770 /sys/class/pwm;\ chown -R root:gpio /sys/devices/platform/*.pwm/pwm/pwmchip* && chmod -R 770 /sys/devices/platform/*.pwm/pwm/pwmchip*\ '" Copy the 50-pwm.rules file to:- "/etc/udev/rules.d/" (without the quotes) Reload the udev rules. udevadm control --reload-rules ; udevadm trigger Here is a shell script to setup the PWM. Values for period and duty-cycle width may be changed as required. filename: setpwm.sh #! /usr/bin/bash # activate the PWM. echo 0 > /sys/class/pwm/pwmchip0/export #Wait for export to settle sleep 2 # set period to 10ms echo 10000000 > /sys/class/pwm/pwmchip0/pwm0/period # set normal polarity. needs to be reset explicitly. Bug? echo "inversed" > /sys/class/pwm/pwmchip0/pwm0/polarity echo "normal" > /sys/class/pwm/pwmchip0/pwm0/polarity # enable the PWM echo 1 > /sys/class/pwm/pwmchip0/pwm0/enable # set duty cycle to 1ms echo 1000000 > /sys/class/pwm/pwmchip0/pwm0/duty_cycle 4/ The NanoPi NEO3 has a push button. From documentation I have found, indicates that it is supposedly a reset button, but it seems to have no effect. This overlay renames the button and sets the function to "Power Off" (or "Reset"). I wanted it to shutdown the NEO3, so I have configured it as "KEY_POWER" (0x74). Change line 15 to "linux,code = <0x198>;" for a Reset button. Overlay filename: rockchip-power-button.dts /dts-v1/; /plugin/; / { compatible = "rockchip,rk3328"; fragment@0 { target-path = "/"; __overlay__ { gpio-keys { button@0 { label = "k1_button"; linux,code = <0x74>; //0x198 = KEY_RESTART, 0x74 = KEY_POWER }; }; }; }; }; Compile, copy and edit as above and reboot. Press the button and the NEO3 should shutdown (or restart). 5/ Apparently the NanoPi R2 has two additional LEDS, ("lan-led" and "wan-led") that the NEO3 does not. The rk3328-nanopi-r2.dtb assigns these LEDS to GPIO pins that are on the 26pin header that would be used as normal GPIO or used by I2S and SPI on the NEO3. To make these pins available for use, I have made an overlay that re-assigns the "lan-led" and "wan-led" to gpios that (according to the NEO3 schematic) are not used on the NEO3. Overlay filename: rockchip-leds.dts /dts-v1/; /plugin/; / { compatible = "rockchip,rk3328"; fragment@0 { target-path = "/"; __overlay__ { gpio-leds { led@2 { gpios = <&gpio0 5 0>; }; led@3 { gpios = <&gpio0 6 0>; }; }; }; }; }; Compile, copy and edit as above and reboot. Check by using "gpioinfo" gpioinfo gpiochip0 The output will show that the "lan-led" and "wan-led" are now assigned to gpiochip0, lines 5 and 6 respectively. I believe that using these simple Device Tree Overlays, has made my NanoPi NEO3 perform as it was intended. I have found one flaw. After upgrading to the latest armbian kernel, 20.02, two GPIO pins will not change state. They are GPIO2_B7/I2S1_MCLK (gpiochip2, 15) and GPIO3_B0/SPI_CSN0 (gpiochip3, 8). Something is loaded during boot that sets them both High (I have LEDs connected and can see when they go High). Using the commands "gpioset gpiochip2 15=0" and "gpioset gpiochip3 8=0" does not turn the LEDs off. There are no errors or warnings when using the commands and "gpioinfo" shows that the pins are "input active-high". This effect did not happen using the previous kernel and happens late in the boot process. I am ruling out any Device Tree problems as the Green Status LED is flashing happily well before either pin goes high. Regards, John
-
Hello, So is anyone aware of a way (like a text file)to populate with values etc to bypass the need to be interactive during first boot? Since this device is displayless and I hate to pop the case every time to hookup the console cable when setting up a half dozen devices. I imagine I could alter the first boot script, but was just wondering if there was another way. Thanks! Richard
-
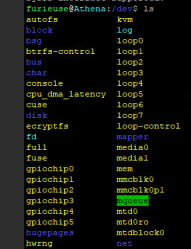
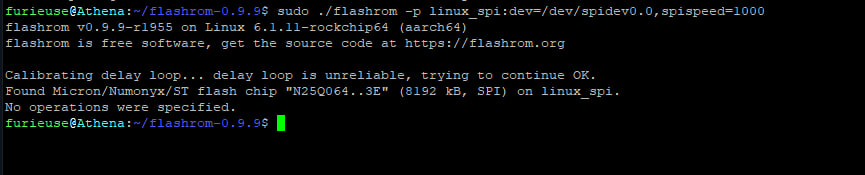
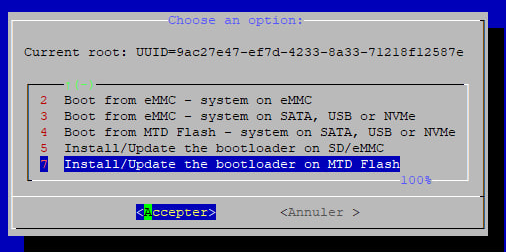
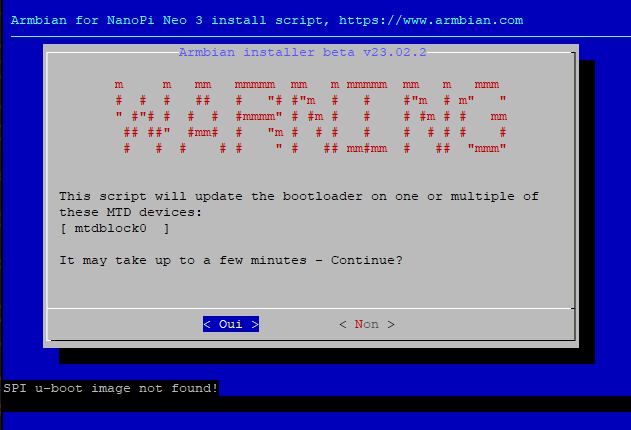
Good morning, I am an electronics engineer, and wanted to make an additional card for the nanopi neo3 based on the rk3328 to add an EMMC and an SPI memory to it so that it no longer uses an sd card. By dint of searching the forum, I managed to modify the dtb files of the neo3 to include the spi@ff190000 of my neo3 and to make the dtbo files spidev and jedec. But unfortunately, armbian-config cannot finish the job. For information I use a N25Q064..3E (flashroom information with active spidev) and goes back well in /dev/mtd0 in jedec. but in my armbian i have no file /usr/lib/uboot***spl.bin. Maybe the problem rk3328-nanopi-neo3-rev02.dtb rockchip-spi-jedec-nor.dtbo rockchip-spi-jedec-nor.dts rockchip-fixup.script rockchip-spi-spidev.dtbo rockchip-spi-spidev.dts



-
 Not sure if this is board-specific, but filing here anyway. After installing armbian from Armbian_23.5.1_Nanopineo3_bookworm_current_6.1.30.img.xz , apt doesn't find the key for the armbian repository. root@nanopi:/tmp# apt update Hit:1 http://deb.debian.org/debian bookworm InRelease Hit:2 http://deb.debian.org/debian bookworm-updates InRelease Hit:3 http://deb.debian.org/debian bookworm-backports InRelease Hit:4 http://security.debian.org bookworm-security InRelease Hit:5 http://fastmirror.pp.ua/armbian bookworm InRelease Err:5 http://fastmirror.pp.ua/armbian bookworm InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 93D6889F9F0E78D5 Reading package lists... Done Building dependency tree... Done Reading state information... Done All packages are up to date. W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: http://fastmirror.pp.ua/armbian bookworm InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 93D6889F9F0E78D5 W: Failed to fetch http://apt.armbian.com/dists/bookworm/InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 93D6889F9F0E78D5 W: Some index files failed to download. They have been ignored, or old ones used instead. I am aware of how to manually add the missing key, but I suppose this should be done by the installation process or be part of the image already. https://paste.armbian.com/ziziqajiru
Not sure if this is board-specific, but filing here anyway. After installing armbian from Armbian_23.5.1_Nanopineo3_bookworm_current_6.1.30.img.xz , apt doesn't find the key for the armbian repository. root@nanopi:/tmp# apt update Hit:1 http://deb.debian.org/debian bookworm InRelease Hit:2 http://deb.debian.org/debian bookworm-updates InRelease Hit:3 http://deb.debian.org/debian bookworm-backports InRelease Hit:4 http://security.debian.org bookworm-security InRelease Hit:5 http://fastmirror.pp.ua/armbian bookworm InRelease Err:5 http://fastmirror.pp.ua/armbian bookworm InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 93D6889F9F0E78D5 Reading package lists... Done Building dependency tree... Done Reading state information... Done All packages are up to date. W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: http://fastmirror.pp.ua/armbian bookworm InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 93D6889F9F0E78D5 W: Failed to fetch http://apt.armbian.com/dists/bookworm/InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 93D6889F9F0E78D5 W: Some index files failed to download. They have been ignored, or old ones used instead. I am aware of how to manually add the missing key, but I suppose this should be done by the installation process or be part of the image already. https://paste.armbian.com/ziziqajiru


