@lex
-
Posts
530 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Everything posted by @lex
-
A litle update, good and bad news. The good news: Camera is alive, so no matter which side you connect the FPC soft cable, pin 1 is always pin 1. (duh!) The bad news: I tried a couple of changes, still not able to work with the camera on M1, need some hardware guy to find the correct fex configuration, but i will keep trying.
-
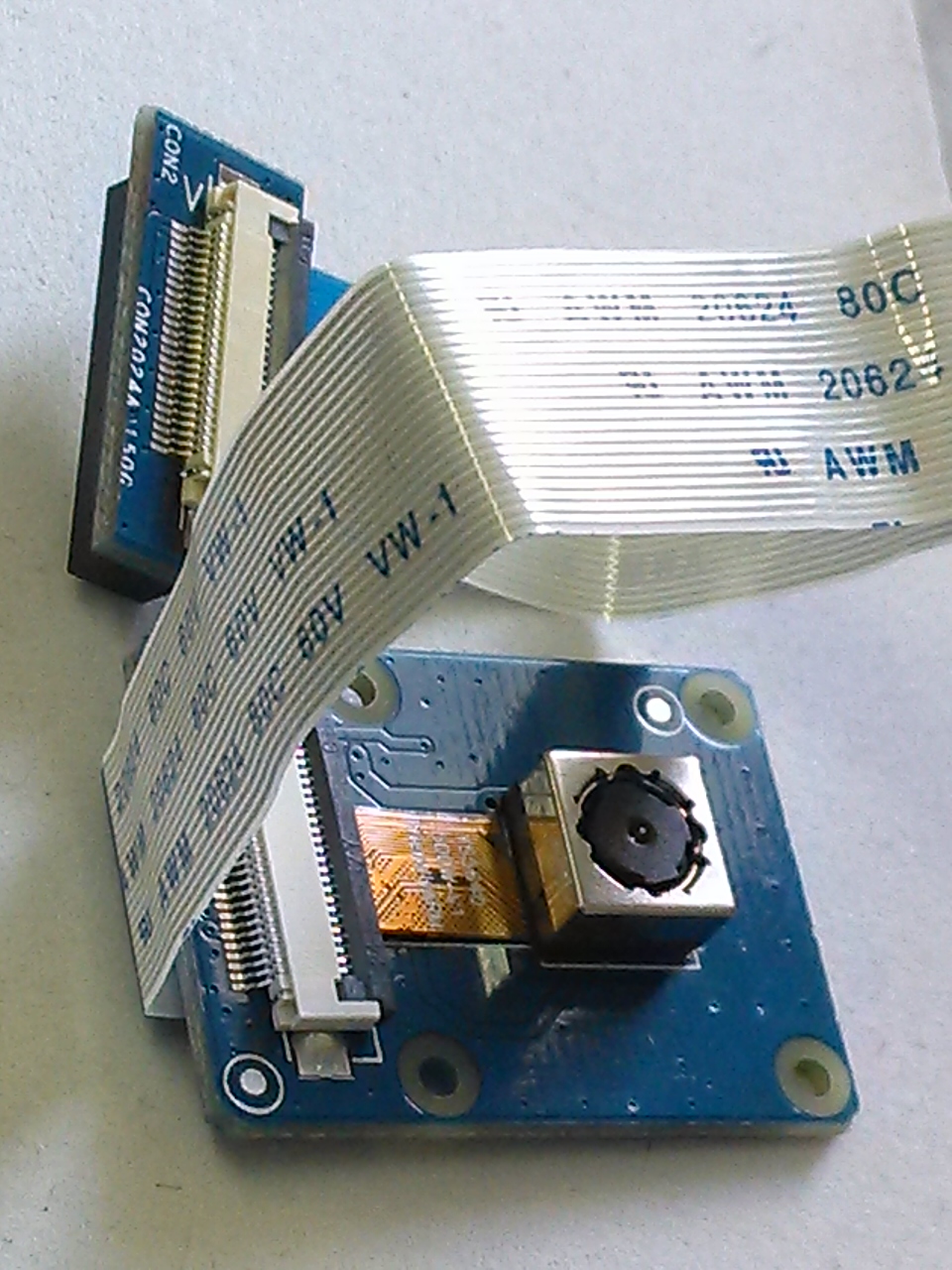
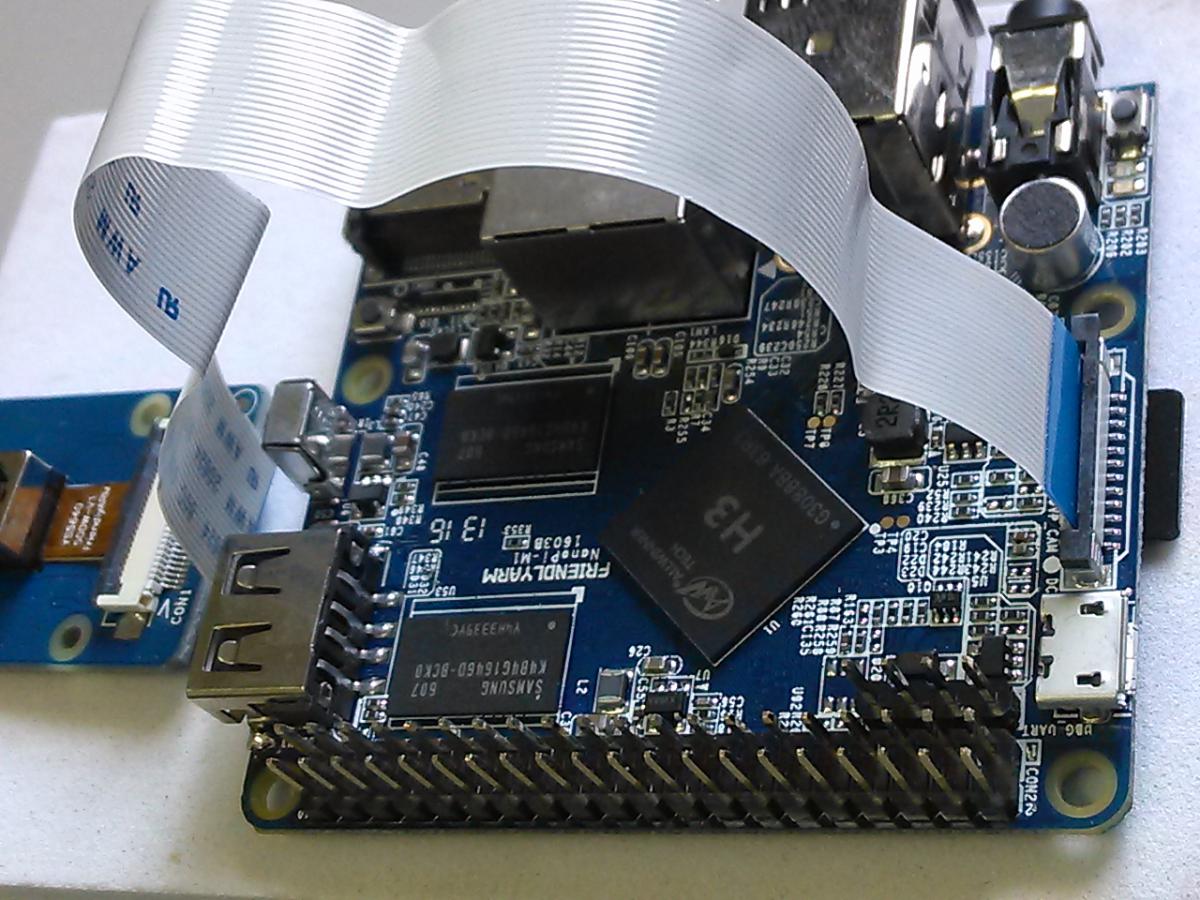
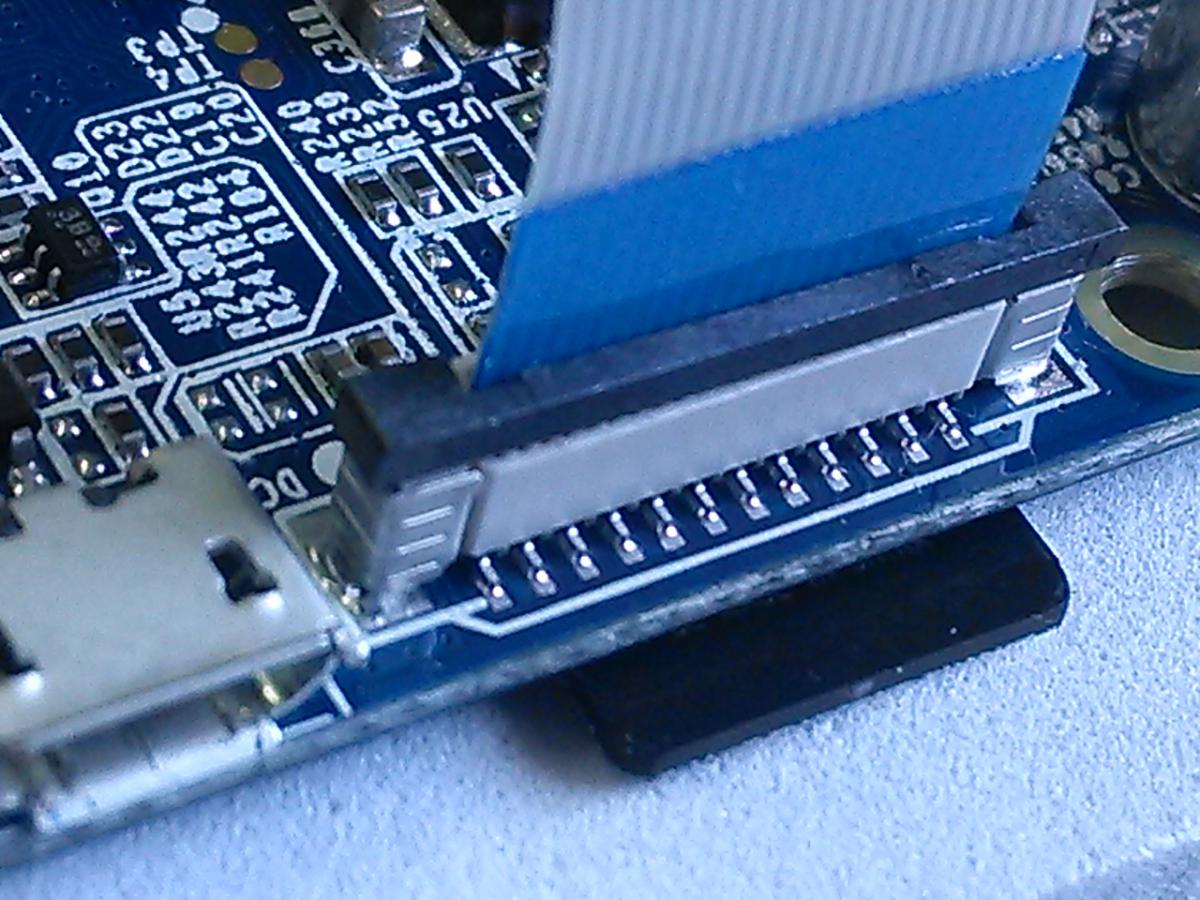
Just for the sake of information: a) Here is how i received the camera and connected it to the board: the film was removed by me the FPC connected close-up: Camera still not detected with @mattday suggestion: [csi0] vip_used = 1 vip_mode = 0 vip_dev_qty = 1 vip_define_sensor_list = 0 vip_csi_pck = port:PE00<2><default><default><default> vip_csi_mck = port:PE01<2><default><default><default> vip_csi_hsync = port:PE02<2><default><default><default> vip_csi_vsync = port:PE03<2><default><default><default> vip_csi_d0 = port:PE04<2><default><default><default> vip_csi_d1 = port:PE05<2><default><default><default> vip_csi_d2 = port:PE06<2><default><default><default> vip_csi_d3 = port:PE07<2><default><default><default> vip_csi_d4 = port:PE08<2><default><default><default> vip_csi_d5 = port:PE09<2><default><default><default> vip_csi_d6 = port:PE10<2><default><default><default> vip_csi_d7 = port:PE11<2><default><default><default> vip_csi_sck = port:PE12<2><default><default><default> vip_csi_sda = port:PE13<2><default><default><default> vip_dev0_mname = "ov5640" vip_dev0_pos = "rear" vip_dev0_lane = 4 vip_dev0_twi_id = 2 vip_dev0_twi_addr = 0x78 vip_dev0_isp_used = 1 vip_dev0_fmt = 0 vip_dev0_stby_mode = 1 vip_dev0_vflip = 1 vip_dev0_hflip = 0 vip_dev0_iovdd = "" vip_dev0_iovdd_vol = 2800000 vip_dev0_avdd = "" vip_dev0_avdd_vol = 2800000 vip_dev0_dvdd = "" vip_dev0_dvdd_vol = 1500000 vip_dev0_afvdd = "" vip_dev0_afvdd_vol = 2800000 ;vip_dev0_power_en = port:PD14<1><default><default><default> vip_dev0_power_en = vip_dev0_reset = port:PE14<1><default><default><default> vip_dev0_pwdn = port:PE15<1><default><default><default> vip_dev0_flash_en = vip_dev0_flash_mode = vip_dev0_af_pwdn = vip_dev0_act_used = 0 vip_dev0_act_name = "ad5820_act" vip_dev0_act_slave = 0x18 vip_dev1_mname = "" vip_dev1_pos = "rear" vip_dev1_lane = 1 vip_dev1_twi_id = 0 vip_dev1_twi_addr = vip_dev1_isp_used = 0 vip_dev1_fmt = 1 vip_dev1_stby_mode = 0 vip_dev1_vflip = 0 vip_dev1_hflip = 0 vip_dev1_iovdd = "" vip_dev1_iovdd_vol = 2800000 vip_dev1_avdd = "" vip_dev1_avdd_vol = 2800000 vip_dev1_dvdd = "" vip_dev1_dvdd_vol = 1500000 vip_dev1_afvdd = "" vip_dev1_afvdd_vol = 2800000 vip_dev1_power_en = vip_dev1_reset = vip_dev1_pwdn = vip_dev1_flash_en = vip_dev1_flash_mode = vip_dev1_af_pwdn = c) Next is to check if camera is still alive on M2 and ask FriendlyArm for some help. If i made a mistake connecting the FPC, please let me know.




-
Hi @mattday, I just received the board and the camera on saturday, customs was holding it. Yes, this is the camera and the FPC soft cable was/came inverted (based on the picture shown with NanoPi 2 board) and with that connector at the end, at first i thought it was a used camera, the FPC cable was folded around the expansion board. I did not take any care and plugged the camera with the config showed by @lvmc for M2+ before reading your message. As i can understand, if i connect it with FPC inverted 3v3 goes to GND, not a good thing. I hope there is some protection on the expansion board or i just got it wrong. In short, the camera could not be recognized, i will test it with your changes and also will try it on M2 to see if i damaged the sensor. If you have any comment about this, please advise.
-
@matday, Please, get back with your results when you try it. I tried to load OV5640 without the camera plugged and got the exact same error, so it's true about I2c. Looking at friendlyarm M1 specification i can see: DVP Camera IF Pin Spec Pin# Name Description 1, 2 SYS_3.3V 3.3V power output, to camera modules 7,9,13,15,24 GND Gound, 0V 3 I2C2_SCL I2C Clock Signal 4 I2C2_SDA I2C Data Signal 5 GPIOE15 Regular GPIO, control signals output to camera modules 6 GPIOE14 Regular GPIO, control signals output to camera modules 8 MCLK Clock signals output to camera modules 10 NC Not Connected 11 VSYNC vertical synchronization to CPU from camera modules 12 HREF/HSYNC HREF/HSYNC signal to CPU from camera modules 14 PCLK PCLK signal to CPU from camera modules 16-23 Data bit7-0 data signals And i wonder if inverting the whole pins may damage the sensor. They have not released any fex configuration yet.
-
I am not sure if i understood, can you clarify? This error: [ 1947.050306] [VFE CCI_0 ERR] Status error at addr_8bit = 78, wr_flag = 1, val = 1000a30 [ 1947.050569] [VFE CCI_0 ERR] Status error at addr_8bit = 78, wr_flag = 1, val = 1000a30 [ 1947.050831] [VFE CCI_0 ERR] Status error at addr_8bit = 78, wr_flag = 1, val = 1000a30 is solved when you switch the whole connector 180 degrees? Or this error occurs after you found the hardware iissue?
-
@lvmc and @mattday, please print your [csi0/csi1] section (fex) so others can help. @mattday, do you have gc2035 module pinout? I expect to receive and work with NanoPi M1 soon. But until then, i am just guessing. Someone else already fixed this possible VFE error, unfortunately he has not disclosed the fix.
-
@lvmc, You just opened the wrong /dev/videoX , open /dev/video0 and you will be OK! I have seen the error VFE_ERR, i guess we need to look closer. Seems you have two cameras attached! @mattday, Sounds like you have to swap two pins, please, have you checked pin to pin with GC2035?
-
I just updated the fswebcam code on github so you are able to set Exposure, Vflip and Hflip contols using command line if you don't want to mess with kernel side. Grab the code: git clone https://github.com/avafinger/fswebcam cd fswebcam ./configure --prefix=/usr --disable-v4l1 --enable-32bit-buffer make sudo make install Some command line samples: fswebcam --Vflip 1 -r 1600x1200 -p YUV420P - > cam1600x1200_2.jpg fswebcam --Hflip 1 -r 800x600 -p YUV420P - > cam800x600_1.jpg fswebcam --exposure 4 -r 640x480 -p YUV420P - > cam640x480_1.jpg Exposure = [-4 to 4] Vflip = [0,1] - Flip image Vertically Hflip = [0,1] - Filp image Horizontally Enjoy
-
TKaiser, Out of curiosity, Sinovoip has 3 camera modules, OV5640 module version 1.0, OV5640 version 2.0 and OV8865 version 3.0, you seem to have one OV5640 module, right? They all use 40 bit FPC cable, if your version is 2.0 and you still have your M3 you could give it a try and you already knows how to build the stable image. Funny is they advertise version 2.0 and show version 1.0: http://www.aliexpress.com/store/product/Raspberry-Pi-Camera-Board-Banana-PI-Camera-OV5640-chip-fully-compatible-with-official-module/302756_2038351355.html BTW i have read Igor got M3 and i have a feeling sooner or later there will be a stable image for the M3, looking forward to hearing news about this.
-
I found this, maybe OV5640 is still available: https://bananapi.gitbooks.io/bpi-accessories/content/bpim3camera.html
-
I have made some simple tests with OV5640 on another board (guitar), still waiting for NanoPI M1 (OPI clone) with 5MP module. I can confirm that OV5640 module (and the driver for this board) works pretty nice and you can get 5MP (2592x1944) at ~5 fps framerate and quality is similar (a bit better i would say) to 1600x1200 (gc2035). * 1280x720 can be rendered at ~17 fps and i can say by observation i has a sharp image (good quality), and the sharpest image i can get is 1600x1200 but at low framerate (~ 4 fps), i think this can be used for taking photos with high quality, while 480x640 and 1280x720 are good candidates for video streams. * AF works with 640x480 only on my simple tests, need to check the Android source code to see which parameters are used to get AF working on HD (1280x720) since kernel is the same. * Armbian will(is) support(ting) guitar (can i say this?), If AW driver sucks we can try to improve it based on Actions code. AW OV5640 code has a lot of more window size to choose suggesting a lower quality image, i may be wrong! I have read the 'Sitheek' post and hope we don't need to fix any code specially the sunxi-vfe code. If the AW OV5640 driver code works as Actions driver code it will be really nice and NanoPi M1, SinoVoip M2+ (M3?) can benefit from this and we can push Steven to design a 5MP module.
-
TKaiser, Sorry if it is a little off topic but you ask me to update about the camera progress. I have not received the M1 yet, i asked for 1GB so it may take a bit longer for them to ship the board. Anyway i have been experimenting with guitar and the 5MP camera so we have a parameter and we can expect something similar on the M1 with 5MP. I just grabbed some images to get the framerate, here are some values: 640x480 => 31 fps 1280x720 => 17 fps 1920x1080 => 10 fps 1600x1200 => 3 fps 2595x1944 => 5 fps - working!!! I can't say much about the quality of the images yet but 1600x1200 has the sharpness image among all and little noise, 3 fps is a problem for video. All this test was made with a dark room, so we could expect different results with good light condition. The camera is AF but does not work the way it works on Android. * Update: About the AF, it is working with 640x480 (not above) and not as 'aggressive' as in Android . https://drive.google.com/open?id=0B7A7OPBC-aN7NlN2SnhFQmgtVkE Let's see how the Nano Pi driver will perform. PS: I have guitar with 3D GPU and HW accel. working but could not make VPU works as i wanted/needed and PowerVR blitting seems behind Mali 400 MP2 while 3D not. @lex
-
TKaiser, thanks for the update. Today i ordered M1 and M2 with 5MP camera and will give it a try when i get them. Can you suggest a PSU for the M1? (Rpi 3 psu can be used?). I will try to do a tiny comparison about the cameras on OPI 2MP, M1 5MP, Guitar 5MP and pine64+ 5MP when i get one (if i ever get it). Just for the curious, there is a guy who is working on a project like this: http://www.pi3dscan.com/ , at first he was disappointed by the 2MP camera quality, he then used the latest GC2035 and got better results, and better than he expected. He told me he would update the results. I think he is using Armbian for the project. Let's hope he finish it and share the results.
-

gc2035 driver update - 320x240|640x480 ~20 fps
@lex replied to @lex's topic in Advanced users - Development
Update: * little fix to hres=0 * added hres=3 (320x240|352x288|640x480 with low quality cropped image) - CIF image size Best performance/quality you can get is 640x480 ~25* fps (hres=0). load driver with this parameters: modprobe gc2035 hres=0 mclk=34 * good ambient light -
gc2035 driver update - 320x240|640x480 ~20 fps
@lex replied to @lex's topic in Advanced users - Development
https://github.com/avafinger/gc2035/blob/master/gc2035_armbian_k3.4.111.patch -
gc2035 driver update - 320x240|640x480 ~20 fps
@lex replied to @lex's topic in Advanced users - Development
OK. I just tried against armbian legacy kernel 3.4.111 without any modifications and have build the driver and kernel with some warnings and errors (fixed). Unless sunxi-vfe (sunxi video front end) is not working yet on this kernel version, you can just create a patch as you did before. I got the following Warning / Errors with my eabihf: arm-linux-gnueabihf-gcc (Ubuntu/Linaro 4.6.3-1ubuntu5) 4.6.3 Fix: And the final warning: libisp is pre-built somewhere? vfe_v4l2-y += lib/libisp If sunxi video front end is not working, i think Igor should drop this and i can try to apply phelum's work. -
gc2035 driver update - 320x240|640x480 ~20 fps
@lex replied to @lex's topic in Advanced users - Development
You are right, he worked on linux-sunxi 3.4.103. We need those patch and see if it will work. Some work is required, the include headers must reflect the sun4i csi headers. Can you try it? -
gc2035 driver update - 320x240|640x480 ~20 fps
@lex replied to @lex's topic in Advanced users - Development
I did not try it, but i don't see any reason to fail or break it. I am not aware of any work done on gc2035 by phelum, can you point to the patches? I does incorporate the work done by Leonardo Lontra in order to get ~20 fps. Just checked loboris' kernel and it is 6 months old, untouched. I don't use Loboris' kernel. If you would like to conduct some benchmarking you could use v4l2loopback (http://www.sistemasembarcados.org/2016/04/orange-pi-camera-with-v4l2loopback-vidcopy.html) as a base, just for fun. -
Hi, I updated the gc2035 driver, kernel 3.4.x. The driver can be loaded with parameter, so you can choose to have different window size and/or image quality on the fly (well, kind of). Parameter: hres=[0,1,2] hres=0 (default without parameter) 640x480, 15 fps, good quality (fps with good light condition) 1280x720, 13 fps, poor quality (fps with good light condition) 1600x1200, 10 fps, poor quality (fps with good light condition) hres=1 800x600, 12 fps, good quality (fps with good light condition) 1600x1200, 8 fps, medium quality (fps with good light condition) hres=2 320x240, 20 fps, poor quality (fps with good light condition) 640x480, 18 fps, medium quality (fps with good light condition) 800x600, 18 fps, medium quality (fps with good light condition) Loading the driver (manually): modprobe gc2035 hres=1 modprobe vfe_v4l2 or add it to /etc/modules Unloading the driver: modprobe -r -v vfe_v4l2 modprobe -r -v gc2035 and loading with other window size and performance: modprobe gc2035 hres=2 modprobe vfe_v4l2 PS: Light condition does affect fps performance! github: https://github.com/avafinger/gc2035 Cheers, @lex
-
Updated: Kconfig minor fix!
-
Hi Igor, Here is YAP (Yet Another Patch) for the TBS5520 USB2 DVB-T/T2/C/S/S2 device (Rafael Micro r848 tuner). Sorry again, i tried 'git diff' but it gets only the first file, if you feel this can be added to the build process, please do it. There is a new version released that someone could give a look, but for now you can test this. git clone https://github.com/avafinger/tbs5520.git @lex PS: This should be applied right after rtl2832 patch.
-
Review Quick review of Banana Pi M2+
@lex replied to tkaiser's topic in Reviews, Tutorials, Hardware hacks
I understand the decision now and thank you for understanding my question, i should learn about supply chain management from now on. Wish you good luck to your new product. -
Review Quick review of Banana Pi M2+
@lex replied to tkaiser's topic in Reviews, Tutorials, Hardware hacks
How much did they save using non programmable voltage regulator? And risking the whole project. I bet you did not receive the camera, maybe that guy who worked on OV5460 was right.