Search the Community
Showing results for tags 'nanopineo2'.
Found 12 results
-
I am getting a thermal zone failure message during boot, which has always happened with kernels after 6.6, at least as far as I know. Is this error actually harmful? HardWare:NanoPi NEO2 Armbian Version: Packages: Debian stable (bookworm) v25.2.3 for NanoPi Neo 2 running Armbian Linux 6.12.20-current-sunxi64 Support: DIY (community maintained) Kernel: Linux nanopineo2 6.12.20-current-sunxi64 #1 SMP Sat Mar 22 19:54:28 UTC 2025 aarch64 GNU/Linux dmesg output [ 7.018086] core: _opp_supported_by_regulators: OPP minuV: 1320000 maxuV: 1320000, not supported by regulator [ 7.018125] cpu cpu0: _opp_add: OPP not supported by regulators (1104000000) [ 7.018245] core: _opp_supported_by_regulators: OPP minuV: 1320000 maxuV: 1320000, not supported by regulator [ 7.018258] cpu cpu0: _opp_add: OPP not supported by regulators (1200000000) [ 7.018413] core: _opp_supported_by_regulators: OPP minuV: 1340000 maxuV: 1340000, not supported by regulator [ 7.018426] cpu cpu0: _opp_add: OPP not supported by regulators (1296000000) [ 7.018552] core: _opp_supported_by_regulators: OPP minuV: 1400000 maxuV: 1400000, not supported by regulator [ 7.018564] cpu cpu0: _opp_add: OPP not supported by regulators (1368000000) [ 7.019699] thermal thermal_zone0: binding cdev cpufreq-cpu0 to trip 3 failed: -22 [ 7.019785] thermal thermal_zone0: binding cdev cpufreq-cpu0 to trip 4 failed: -22 dmesg.txt
-
 Hi, i could control the OTG micro USB port power on my NanoPi Neo (H3) by exporting and writing to GPIO 354 (line 2 of GPIO chip with base 352) I'm using Kernel V6.6.62 and I created a tiny device tree overlay defining. Excerpt below: usb@1c19000 { dr_mode = "host" } usb0-vbus { status = "okay" } This works fine! For test purposes, I switched to a NanoPi Neo2 (H5) with Kernel 6.6.62 (64 bit). Here, the OTG port is powered on and is usable by default without any overlay. But the on/off control does not work anymore. All attempts to export GPIO 354 give "write error: Device or resource busy". Schematics show no circuit difference in controlling the OTG power. In both cases its the same pin name on H3 and H5. The new GPIO handling of newer kernels cannot be the reason, as I use the same kernel versions on H3 and H5 (beside bit width). Any idea whats wrong and how I can again switch on/off OTG power?
Hi, i could control the OTG micro USB port power on my NanoPi Neo (H3) by exporting and writing to GPIO 354 (line 2 of GPIO chip with base 352) I'm using Kernel V6.6.62 and I created a tiny device tree overlay defining. Excerpt below: usb@1c19000 { dr_mode = "host" } usb0-vbus { status = "okay" } This works fine! For test purposes, I switched to a NanoPi Neo2 (H5) with Kernel 6.6.62 (64 bit). Here, the OTG port is powered on and is usable by default without any overlay. But the on/off control does not work anymore. All attempts to export GPIO 354 give "write error: Device or resource busy". Schematics show no circuit difference in controlling the OTG power. In both cases its the same pin name on H3 and H5. The new GPIO handling of newer kernels cannot be the reason, as I use the same kernel versions on H3 and H5 (beside bit width). Any idea whats wrong and how I can again switch on/off OTG power? -
I just booted the NanoPi Neo2 with the latest "Server images with Armbian Linux v6.6" running Ubuntu 24.04 (Noble). After logging in via SSH, I saw a message stating that this image is for development use only and not for production. Based on your experience, how stable is the development image? Am I correct in understanding that there is no stable image for NanoPi Neo 2 ?
-
Has anyone had any success with running a current/semi current OS and the NAS/RTC Enclosure/Hat from FriendlyElec. I was never impressed with the NAS/OpenMediaVault image that shipped with the board/hat. I have attempted to strip OMV out of the device and move the device forward with some success. The the Kernel is stuck at v4.14.52. But I would prefer to load a clean current OS and potentially use the correct overlays to enable the extra USB Ports, USB to SATA Bridge and RTC features. Question is does anyone have any information/guide to use a current version of Armbian/Community and the correct overlay file(s) to allow the the JMicron USB to SATA interface and Realtime Clock to be enabled. Greg
-
 Today I did update my 3 NanoPi Neo2 via apt update/upgrade, but only one is accessable via ssh after the update. (without SSH/SSL-conect also no conection via SFTP/WinSCP because if the timeout) The one which is accessable has after the update Welcome to Armbian 23.02.2 Bullseye with bleeding edge Linux 6.7.12-edge-sunxi64 ( Machine model: FriendlyARM NanoPi NEO 2) The two other do show prompts for user/password but doesnt login via ssh - and after some time they time out and I can reenter user/password After connecting via TTL-serial I can also enter user/password and then the Neo2 shows me: _ _ ____ _ _ _ ____ | \ | | _ \(_) | \ | | ___ ___ |___ \ | \| | |_) | | | \| |/ _ \/ _ \ __) | | |\ | __/| | | |\ | __/ (_) | / __/ |_| \_|_| |_| |_| \_|\___|\___/ |_____| Welcome to Armbian 23.8.1 Bullseye with bleeding edge Linux 6.7.12-edge-sunxi64 No end-user support: community creations System load: 266% Up time: 2 min Memory usage: 22% of 982M IP: 192.168.6.24 CPU temp: 73°C Usage of /: 54% of 15G storage/: 56% of 458G storage temp: 41°C RX today: 4.2 GiB [ General system configuration (beta): armbian-config ] Last login: Tue Dec 27 14:13:30 +03 2022 from 192.168.6.17 on pts/0 After prssing Ctrl-C: ^C Armbian 23.8.1 bullseye ttyS0 npi-neo2-24 login: For non-existing users I do get a timeout at the serial-TTL-Port: npi-neo2-24 login: maxandmoritz Password: Login timed out after Armbian 23.8.1 bullseye ttyS0 npi-neo2-24 login: but nothing more - and this time the login doenst time out. But the armbian seems to boot up correctly, because the SAMBA-server on the Neo2 is available/useable. So the only way to change something in the system will be to make modifikations to the SDCard - but which change have I to do? Maybe its something between the Neo2 Revisions 1&2 (not/no Black Revision). Does anyone got a glue/idea for me? Thanks in advance Guido
Today I did update my 3 NanoPi Neo2 via apt update/upgrade, but only one is accessable via ssh after the update. (without SSH/SSL-conect also no conection via SFTP/WinSCP because if the timeout) The one which is accessable has after the update Welcome to Armbian 23.02.2 Bullseye with bleeding edge Linux 6.7.12-edge-sunxi64 ( Machine model: FriendlyARM NanoPi NEO 2) The two other do show prompts for user/password but doesnt login via ssh - and after some time they time out and I can reenter user/password After connecting via TTL-serial I can also enter user/password and then the Neo2 shows me: _ _ ____ _ _ _ ____ | \ | | _ \(_) | \ | | ___ ___ |___ \ | \| | |_) | | | \| |/ _ \/ _ \ __) | | |\ | __/| | | |\ | __/ (_) | / __/ |_| \_|_| |_| |_| \_|\___|\___/ |_____| Welcome to Armbian 23.8.1 Bullseye with bleeding edge Linux 6.7.12-edge-sunxi64 No end-user support: community creations System load: 266% Up time: 2 min Memory usage: 22% of 982M IP: 192.168.6.24 CPU temp: 73°C Usage of /: 54% of 15G storage/: 56% of 458G storage temp: 41°C RX today: 4.2 GiB [ General system configuration (beta): armbian-config ] Last login: Tue Dec 27 14:13:30 +03 2022 from 192.168.6.17 on pts/0 After prssing Ctrl-C: ^C Armbian 23.8.1 bullseye ttyS0 npi-neo2-24 login: For non-existing users I do get a timeout at the serial-TTL-Port: npi-neo2-24 login: maxandmoritz Password: Login timed out after Armbian 23.8.1 bullseye ttyS0 npi-neo2-24 login: but nothing more - and this time the login doenst time out. But the armbian seems to boot up correctly, because the SAMBA-server on the Neo2 is available/useable. So the only way to change something in the system will be to make modifikations to the SDCard - but which change have I to do? Maybe its something between the Neo2 Revisions 1&2 (not/no Black Revision). Does anyone got a glue/idea for me? Thanks in advance Guido -
Armbian 6.6.16-sunxi64 (bookworm) on NanoPi NEO2 NanoHatOLED fails: - GPIO devices are missing; 2024-03-29 23:04:55 root@M-DNS:~# uname -a Linux M-DNS 6.6.16-current-sunxi64 #2 SMP Fri Feb 23 08:25:28 UTC 2024 aarch64 GNU/Linux Seems regression of earlier issue that had been solved: Would appreciate as GPIO will restored in kernel.
-
 As per the Subject, the I2C bus 0 is enabled and detected, but I don't see an addresses being returned when I try the i2cdetect -y 0 command. I have a single PCF 8574A connected with address 0x38. and have double checked the wiring. The PCF8574A did respond on the I2C bus on another SBC. Thanks John
As per the Subject, the I2C bus 0 is enabled and detected, but I don't see an addresses being returned when I try the i2cdetect -y 0 command. I have a single PCF 8574A connected with address 0x38. and have double checked the wiring. The PCF8574A did respond on the I2C bus on another SBC. Thanks John -
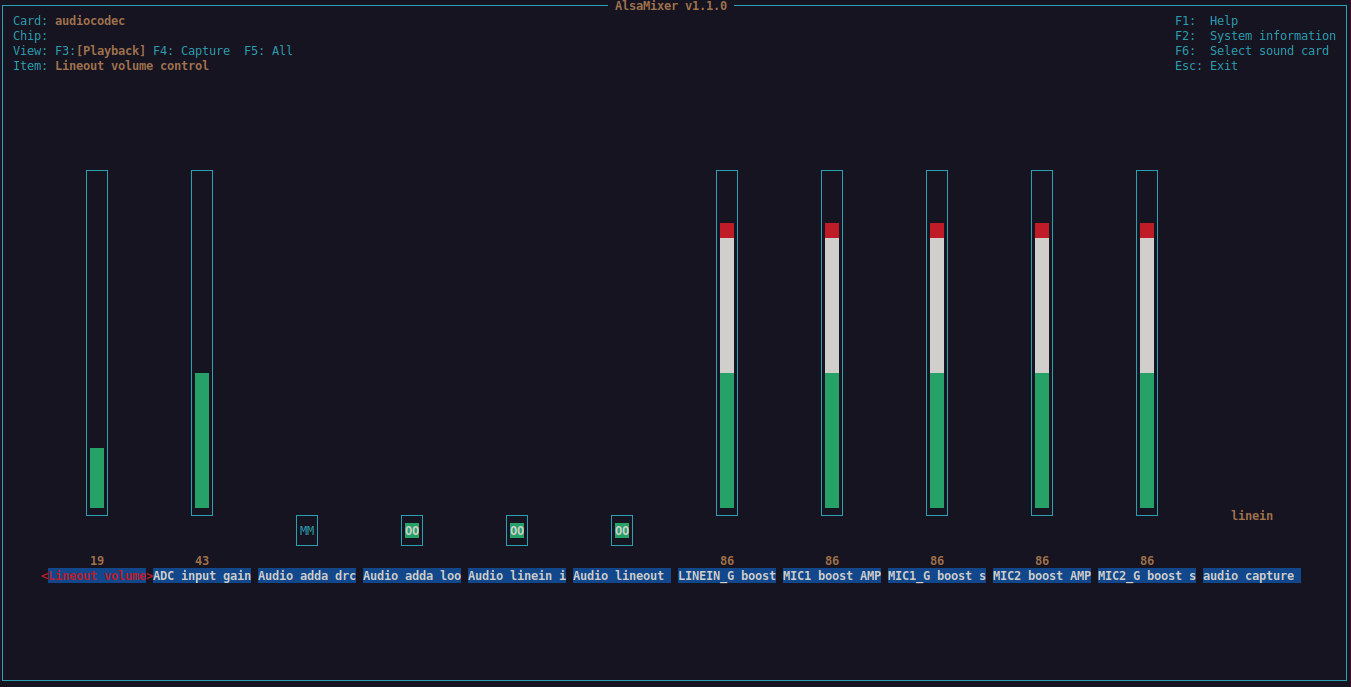
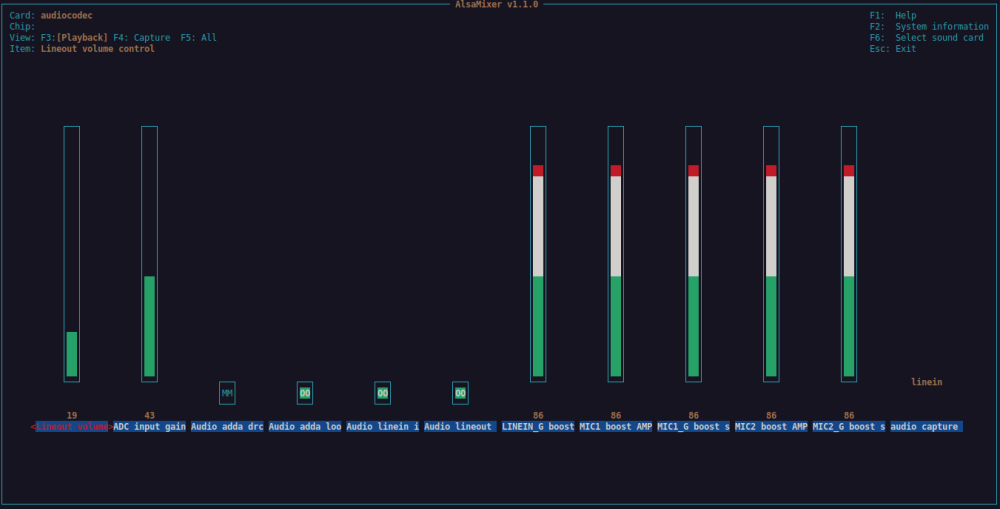
Hello, I try to enable audio linein, controls with alsamixer are the following. Is it possible to redirect audio input to output directly or with audio equalizer ? I actually have sound with a speaker test, but I can't listen to the audio line-inActually I have sound with speaker test, but I can't listen audio linein Best regards
-
Hello, I try build kernel for NanopiNeo board with user kernel patch, but I don't understand with path needed put my patch. In previous version armbian's builds I just put files to userpatches/kernel/sunxi-current how it described in docs. But now with current version Armbian build system it's not working. I put my custom linux-sunxi-current.config to userpatches folder, my patch to userpatches/kernel/sunxi-current and try build kernel with command: ./compile.sh BOARD=nanopineo BRANCH=current kernel I see that linux-sunxi-current.config found and applied but not patch isn't.
-
Hello I'm using armbian on a Neo 2 board and I wanted to use a Quectel EM05 or EC25 LTE modem with it. Actually only need the serial port to send AT-commands. My question is, are Quectel modems natively supported by armbian (QMI? MBMI? ), or do I need to add the driver manually and rebuild the image??? Thank you (Yeah, it's a noob question ) Edit: Ok, I connected to modem to the board and realized that a wwan0 interface was created. That's fine, but I actually needed the serial port ttySx in order to sen AT-commands, but there is not one available... that's actually very strange.
-
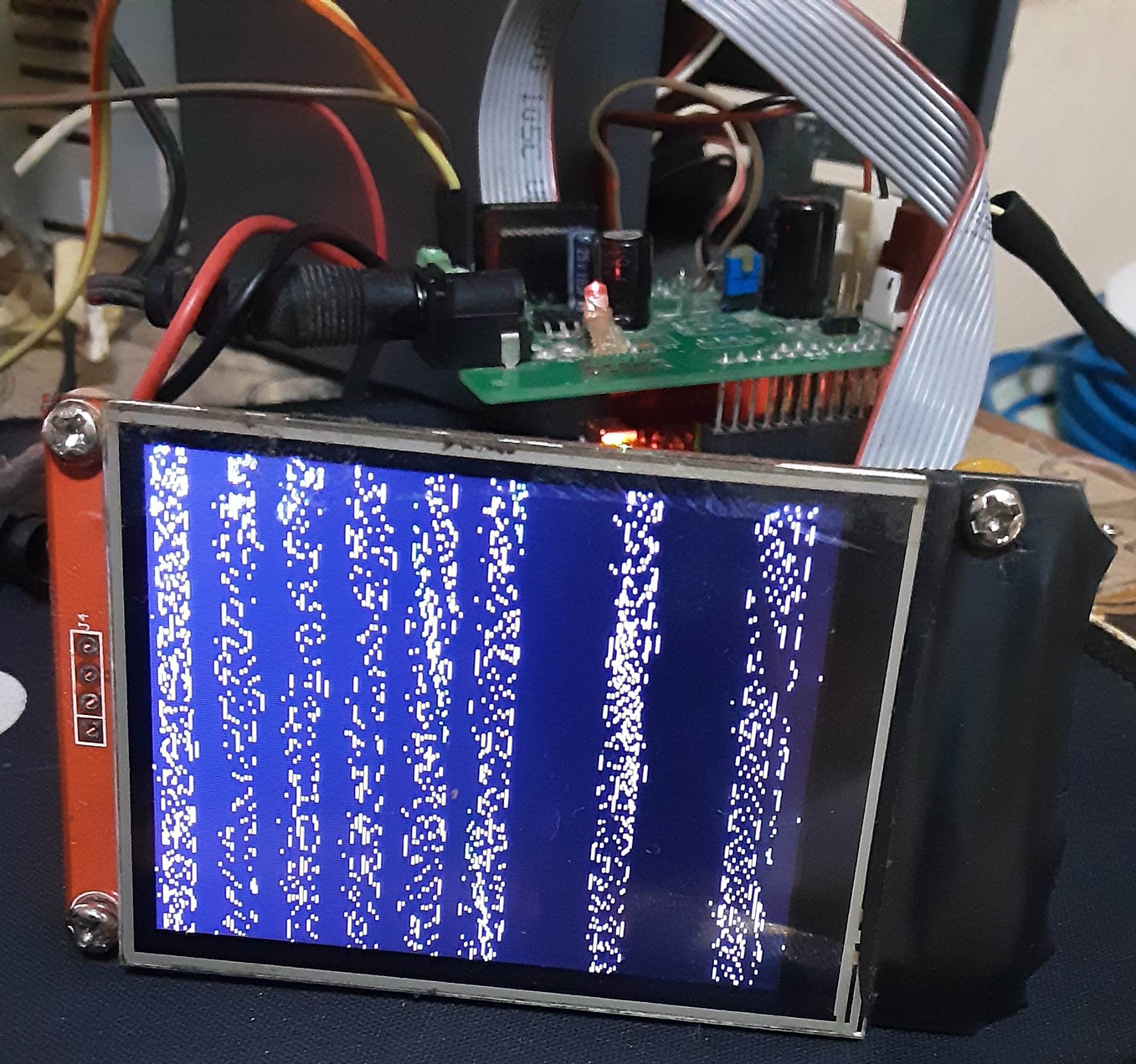
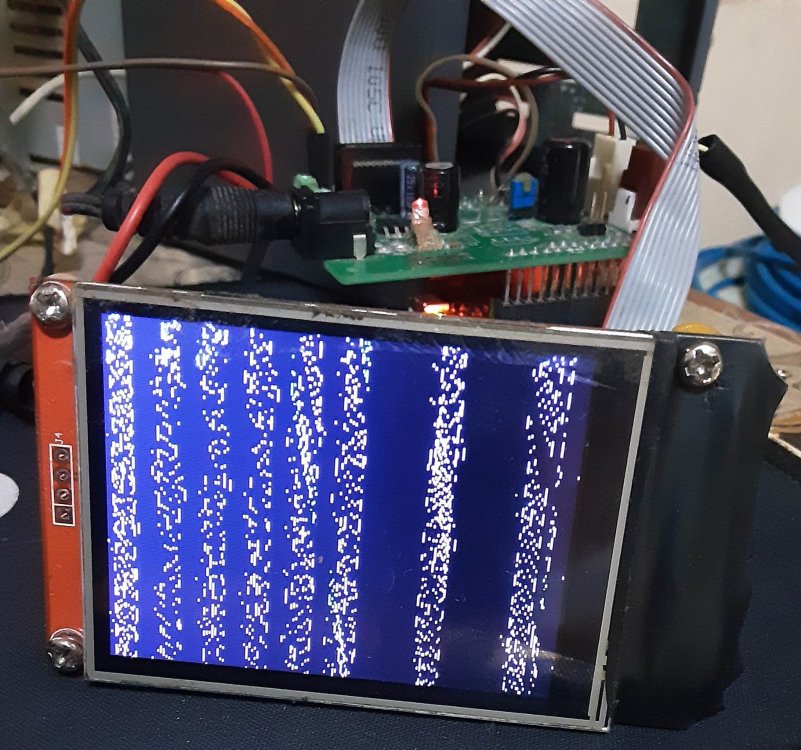
Hi, I finally have time to get back to my little project. I've been trying to get a working display with tinydrm for an ILI9341 base lcd. My setup works on OpenWrt with the older fbtft driver, but now I'd like to go back and try Armbian (current release is Jammy) on it. My first try with devicetree overlay seems functional but not correct. The display just show garbled data (see attached). What could be the problem with it? This is my env. verbosity=1 bootlogo=false console=both overlay_prefix=sun50i-h5 overlays=usbhost1 usbhost2 spi-spidev param_spidev_spi_bus=0 rootdev=UUID=e0ed80c4-a252-4d96-ad61-78b7834d6b8d rootfstype=ext4 user_overlays=spilcd usbstoragequirks=0x2537:0x1066:u,0x2537:0x1068:u and this is my overlay /dts-v1/; /plugin/; / { compatible = "allwinner,sun4i-a10", "allwinner,sun7i-a20", "allwinner,sun8i-h3", "allwinner,sun50i-a64", "allwinner,sun50i-h5"; fragment@0 { target = <&spi0>; __overlay__ { #address-cells = <1>; #size-cells = <0>; display: display@0 { compatible = "adafruit,yx240qv29", "ilitek,ili9341"; reg = <0>; rotation = <270>; reset-gpios = <&pio 0 6 0>; /* GPIOA 6 */ dc-gpios = <&pio 0 3 0>; /* GPIOA 3 */ }; }; }; };
-
 Since volatile journald logging is done in-memory in /run/log/journal, and made persistent in /var/log.hdd/journal, the rsync of /var/log/journal in nand-sata-install no longer works because it is a symlink to /var/log.hdd/journal in the live system, and will create a circular symlink when booting from NAND. On the target image /var/log is the folder that is directory-mounted to /var/log.hdd during boot. I propose to exclude /var/log from the rsync, and rsync /var/log.hdd to /var/log on the target image. Another solution could be to exclude only /var/log/journal from the rsync, and create an empty /var/log/journal in the target image. Kind regards, Dennis
Since volatile journald logging is done in-memory in /run/log/journal, and made persistent in /var/log.hdd/journal, the rsync of /var/log/journal in nand-sata-install no longer works because it is a symlink to /var/log.hdd/journal in the live system, and will create a circular symlink when booting from NAND. On the target image /var/log is the folder that is directory-mounted to /var/log.hdd during boot. I propose to exclude /var/log from the rsync, and rsync /var/log.hdd to /var/log on the target image. Another solution could be to exclude only /var/log/journal from the rsync, and create an empty /var/log/journal in the target image. Kind regards, Dennis