berin
-
Posts
97 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Everything posted by berin
-
So I'm just looking for some feed back. IS there still interest out there for me to continue developing this case design for the orange pi 5? It wont be until after I move but that will be in the next few months. If there is no interest then I may or may not finish the aspects I never got to do, do to my fathers passing and all the problems it/HE created. If I don't get any feed back I may not even post that content when I do get to finishing it.
-
We will see what happens, Its been a very long time since I last posted I am sorry I am sorry. Between the stock market down turn and my fathers passing (finally 5 years stage 4 ) My father did a lot of.. .. ... stuff because he was angry about being Ill and end of life. He created a lot of problems for myself and siblings with intent! Believe me if I knew how to do and deal with go fund me like stuff I would. When all of the legal (probate) stuff is over and we "ARE" nearing the end I will be free(ed) and finish development of this project. I also have a lot of other stuff I've been working on. For example my new larger cnc machine I finished building. I can not wait to get back to being part of the community and contributing.
-
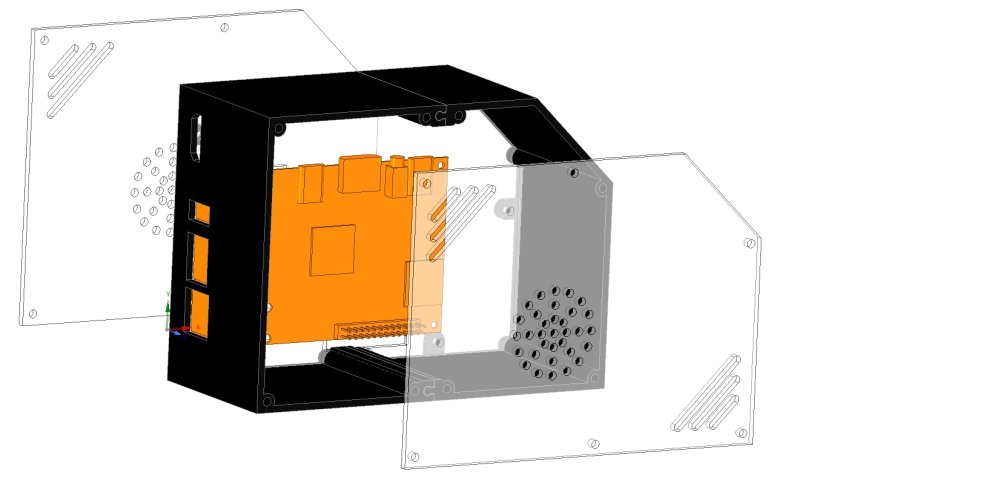
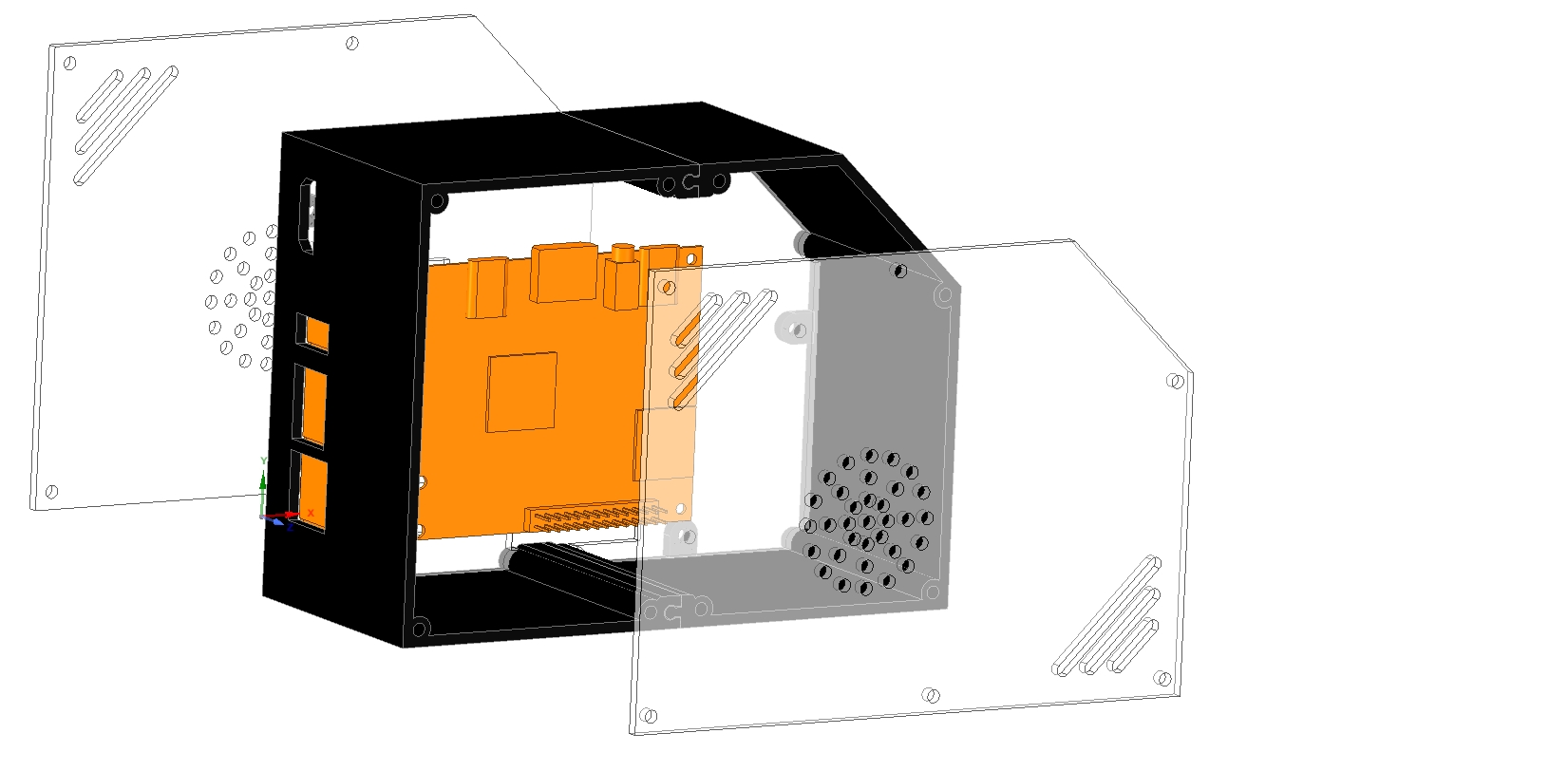
I have created a micro desktop case. It's an open design that is still in the creation phase. The shell is 3d printed, the sides are acrylic, and the opi5 mount panel can be 3d printed or made from acrylic. I'm looking for feedback with design suggestions/needs. This is the first real opi5 micro tower design currently for OPI5. My cad drawing of the OPI5 mainboard is 99.9% accurate, so if someone wants to use that as a footprint for other projects by all means. https://github.com/berin-aquaquad/orange-pi-5 I am using DesignSpark Mechanical a free cad software that is on par with Fusion360. The shell has been designed as a split body so smaller 3d printers can create it. Again, this is a work in progress, and nothing is set in stone. Planned design additions for consideration: Headphone jack front or back. USB on front. Stats LCD on front. 3D printed power button to press power button on OPI5 motherboard. GPIO header for external access, "custom design or standard web link to example, I need feedback ". RTC battery holder to make use of the onboard RTC. RGB Micro Desktop case LIGHTING options?