

gounthar
-
Posts
421 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Posts posted by gounthar
-
-
Thanks a bunch.
-
Nope, sorry.
-
What about hardware encoding with mainline?
Is it possible now? -
I do love the XU4, but it only sports 2GB of RAM.
-
Today, I discovered the Compulab Utilite Pro which is up to 4GB ram, but only Cortex A9 and no real sturdy storage solution.
I also found the AM5718 SBC which seems to have almost everything on the paper (Texas Instruments Sitara AM5728 dual-core ARM Cortex-A15, 1.5GHz
NEON SIMD and VFPv4mm, Sata, 4GB Ram). Yes, only two cores, bummer! And one can't buy it just like that, there is no store whatsoever.
From the same vendor, there is also the SBC-iMX6 with NXP (Freescale) i.MX6 Plus quad-core ARM Cortex-A9, 1GHz NEON SIMD and VFPv3, up to 4GB of RAM and Sata. Yes, only Cortex-A9, and no way to easily buy it either.But that's a good candidate anyway (until I get the real price I suppose).
-
Instead of an A17 or A9 Cortex, there also is A15, like the Jetson TK1.
Sata, quad core, but only 2GB of ram.
I will keep on searching. -
Did you check the power supply, the cable and the SDCard?
-
Thank you, I'm already using one as my `aarch64` gitlab runner.

-
The kernel got correctly updated tonight.
Welcome to Armbian 22.02.1 Focal with bleeding edge Linux 5.16.10-bcm2711Docker now works.
Spoilersudo docker run hello-world [sudo] password for poddingue: Unable to find image 'hello-world:latest' locally latest: Pulling from library/hello-world 93288797bd35: Pull complete Digest: sha256:97a379f4f88575512824f3b352bc03cd75e239179eea0fecc38e597b2209f49a Status: Downloaded newer image for hello-world:latest Hello from Docker! This message shows that your installation appears to be working correctly. To generate this message, Docker took the following steps: 1. The Docker client contacted the Docker daemon. 2. The Docker daemon pulled the "hello-world" image from the Docker Hub. (arm64v8) 3. The Docker daemon created a new container from that image which runs the executable that produces the output you are currently reading. 4. The Docker daemon streamed that output to the Docker client, which sent it to your terminal. To try something more ambitious, you can run an Ubuntu container with: $ docker run -it ubuntu bash Share images, automate workflows, and more with a free Docker ID: https://hub.docker.com/ For more examples and ideas, visit: https://docs.docker.com/get-started/Thanks a lot for your work.
-
You're right. It's supposed to go on a mainboard with various interfaces, but there is no USB-3 nor mSata nor M.2.
Juste mPCIE for LTE modules. -
-
Hi there,
Yesterday, I asked this question on Twitter, but did not get lots of answers.I know I could get an aarch64 workstation, run a 64 bits kernel on it and a 32 bits userspace on top of it, but where is the fun?
One year ago or so, I built an armv7 Docker image for me, and I realized only this week that it had been downloaded more than 2 million times. What a pleasant surprise.
I launched the build once again to get everything updated, but I discovered the armv7 CI/CD services I used to run my builds on were ... gone.
I then switched back to my Orange Pi Zero "farm" to get the images built, but it takes ages, and you know how reliable the SDCards are.So... I was wondering if I could get a beefy armv7 machine before they all become history.
I thought of the SolidRun ClearFog (2 A9 cores, 1GB/8GB eMMC, M.2) and HummingBoard Edge (4 A9 cores, 2GB/8GB eMMC, M.2) platforms, but 2 cores isn't much, and 1GB isn't much either.
I then thought of the A17 Cortex which came later on, but there aren't many implementations, apart from the RK3288 (from 2014). I have not yet found a RK3288-based board/workstation that looks sturdy enough to be used as a CI/CD runner except this one.Edward Vielmetti told me about the A17 Cortex MediaTek MT6595, but hasn't found any SBC using it.
There are also a few Chromebooks with 4GB/16GB eMMC, but I don't want to go that route.So... Would any of you know of an armv7 A9/A17 Cortex board/workstation/server/whatever with sturdy storage, 4 cores or more, 2GB or more of memory?
I can't afford a Ampere eMag and use a 32 bits userspace, and I'm trying to buya 2nd hand SolidRun HoneyComb, but it's also a 64 bits machine.
Thanks! -
I think I have my answer, as the kernels are not freezed, they are updated.
When it works.") Spoiler
Spoilersudo apt dist-upgrade Lecture des listes de paquets... Fait Construction de l'arbre des dépendances Lecture des informations d'état... Fait Calcul de la mise à jour... Fait Les paquets suivants seront mis à jour : armbian-bsp-cli-rpi4b-fkraspi armbian-zsh linux-dtb-edge-bcm2711 linux-image-edge-bcm2711 linux-libc-dev 5 mis à jour, 0 nouvellement installés, 0 à enlever et 0 non mis à jour. 5 partiellement installés ou enlevés. Il est nécessaire de prendre 27,9 Mo dans les archives. Après cette opération, 20,5 ko d'espace disque supplémentaires seront utilisés. Souhaitez-vous continuer ? [O/n] Réception de :1 https://imola.armbian.com/beta focal/main arm64 linux-image-edge-bcm2711 arm64 22.02.0-trunk.0043 [24,2 MB] Réception de :2 https://imola.armbian.com/beta focal/main arm64 armbian-bsp-cli-rpi4b-fkraspi arm64 22.02.0-trunk.0044 [129 kB] Réception de :3 https://imola.armbian.com/beta focal/main arm64 armbian-zsh all 22.02.0-trunk.0044 [2 266 kB] Réception de :4 https://imola.armbian.com/beta focal/main arm64 linux-dtb-edge-bcm2711 arm64 22.02.0-trunk.0043 [84,1 kB] Réception de :5 https://imola.armbian.com/beta focal/main arm64 linux-libc-dev arm64 22.02.0-trunk.0044 [1 182 kB] 27,9 Mo réceptionnés en 7s (4 016 ko/s) (Lecture de la base de données... 41471 fichiers et répertoires déjà installés.) Préparation du dépaquetage de .../linux-image-edge-bcm2711_22.02.0-trunk.0043_arm64.deb ... update-initramfs: Deleting /boot/initrd.img-5.16.9-bcm2711 Dépaquetage de linux-image-edge-bcm2711 (22.02.0-trunk.0043) sur (22.02.0-trunk.0042) ... Préparation du dépaquetage de .../armbian-bsp-cli-rpi4b-fkraspi_22.02.0-trunk.0044_arm64.deb ... Dépaquetage de armbian-bsp-cli-rpi4b-fkraspi (22.02.0-trunk.0044) sur (22.02.0-trunk.0042) ... Préparation du dépaquetage de .../armbian-zsh_22.02.0-trunk.0044_all.deb ... Dépaquetage de armbian-zsh (22.02.0-trunk.0044) sur (22.02.0-trunk.0042) ... Préparation du dépaquetage de .../linux-dtb-edge-bcm2711_22.02.0-trunk.0043_arm64.deb ... Dépaquetage de linux-dtb-edge-bcm2711 (22.02.0-trunk.0043) sur (22.02.0-trunk.0042) ... Préparation du dépaquetage de .../linux-libc-dev_22.02.0-trunk.0044_arm64.deb ... Dépaquetage de linux-libc-dev:arm64 (22.02.0-trunk.0044) sur (22.02.0-trunk.0042) ... Paramétrage de linux-image-edge-bcm2711 (22.02.0-trunk.0043) ... * dkms: running auto installation service for kernel 5.16.10-bcm2711 [ OK ] update-initramfs: Generating /boot/initrd.img-5.16.10-bcm2711 Using DTB: bcm2710-rpi-3-b-plus.dtb Couldn't find DTB bcm2710-rpi-3-b-plus.dtb on the following paths: /etc/flash-kernel/dtbs /usr/lib/linux-image-5.16.10-bcm2711 /lib/firmware/5.16.10-bcm2711/device-tree/ Installing into /boot/dtbs/5.16.10-bcm2711/./bcm2710-rpi-3-b-plus.dtb cp: cannot stat '': No such file or directory run-parts: /etc/initramfs/post-update.d//flash-kernel exited with return code 1 run-parts: /etc/kernel/postinst.d/initramfs-tools exited with return code 1 Using DTB: bcm2710-rpi-3-b-plus.dtb Couldn't find DTB bcm2710-rpi-3-b-plus.dtb on the following paths: /etc/flash-kernel/dtbs /usr/lib/linux-image-5.16.10-bcm2711 /lib/firmware/5.16.10-bcm2711/device-tree/ Installing into /boot/dtbs/5.16.10-bcm2711/./bcm2710-rpi-3-b-plus.dtb cp: cannot stat '': No such file or directory run-parts: /etc/kernel/postinst.d/zz-flash-kernel exited with return code 1 dpkg: erreur de traitement du paquet linux-image-edge-bcm2711 (--configure) : installed linux-image-edge-bcm2711 package post-installation script subprocess returned error exit status 1 Paramétrage de initramfs-tools (0.136ubuntu6.7) ... update-initramfs: deferring update (trigger activated) Paramétrage de linux-firmware (1.187.26) ... update-initramfs: Generating /boot/initrd.img-5.16.10-bcm2711 Using DTB: bcm2710-rpi-3-b-plus.dtb Couldn't find DTB bcm2710-rpi-3-b-plus.dtb on the following paths: /etc/flash-kernel/dtbs /usr/lib/linux-image-5.16.10-bcm2711 /lib/firmware/5.16.10-bcm2711/device-tree/ Installing into /boot/dtbs/5.16.10-bcm2711/./bcm2710-rpi-3-b-plus.dtb cp: cannot stat '': No such file or directory run-parts: /etc/initramfs/post-update.d//flash-kernel exited with return code 1 dpkg: erreur de traitement du paquet linux-firmware (--configure) : installed linux-firmware package post-installation script subprocess returned error exit status 1 Paramétrage de linux-libc-dev:arm64 (22.02.0-trunk.0044) ... Paramétrage de docker.io (20.10.7-0ubuntu5~20.04.2) ... Created symlink /etc/systemd/system/multi-user.target.wants/docker.service → /lib/systemd/system/docker.service. Created symlink /etc/systemd/system/sockets.target.wants/docker.socket → /lib/systemd/system/docker.socket. Job for docker.service failed because the control process exited with error code. See "systemctl status docker.service" and "journalctl -xe" for details. invoke-rc.d: initscript docker, action "start" failed. ● docker.service - Docker Application Container Engine Loaded: loaded (/lib/systemd/system/docker.service; enabled; vendor preset: enabled) Active: activating (auto-restart) (Result: exit-code) since Sat 2022-02-19 21:08:28 CET; 27ms ago TriggeredBy: ● docker.socket Docs: https://docs.docker.com Process: 10956 ExecStart=/usr/bin/dockerd -H fd:// --containerd=/run/containerd/containerd.sock (code=exited, status=1/FAILURE) Main PID: 10956 (code=exited, status=1/FAILURE) Paramétrage de armbian-zsh (22.02.0-trunk.0044) ... Paramétrage de armbian-bsp-cli-rpi4b-fkraspi (22.02.0-trunk.0044) ... Recreating boot script Paramétrage de linux-dtb-edge-bcm2711 (22.02.0-trunk.0043) ... Paramétrage de flash-kernel (3.103ubuntu1~20.04.3) ... Using DTB: bcm2710-rpi-3-b-plus.dtb Couldn't find DTB bcm2710-rpi-3-b-plus.dtb on the following paths: /etc/flash-kernel/dtbs /usr/lib/linux-image-5.16.10-bcm2711 /lib/firmware/5.16.10-bcm2711/device-tree/ Installing into /boot/dtbs/5.16.10-bcm2711/./bcm2710-rpi-3-b-plus.dtb cp: cannot stat '': No such file or directory dpkg: erreur de traitement du paquet flash-kernel (--configure) : installed flash-kernel package post-installation script subprocess returned error exit status 1 Traitement des actions différées (« triggers ») pour initramfs-tools (0.136ubuntu6.7) ... update-initramfs: Generating /boot/initrd.img-5.16.10-bcm2711 Using DTB: bcm2710-rpi-3-b-plus.dtb Couldn't find DTB bcm2710-rpi-3-b-plus.dtb on the following paths: /etc/flash-kernel/dtbs /usr/lib/linux-image-5.16.10-bcm2711 /lib/firmware/5.16.10-bcm2711/device-tree/ Installing into /boot/dtbs/5.16.10-bcm2711/./bcm2710-rpi-3-b-plus.dtb cp: cannot stat '': No such file or directory run-parts: /etc/initramfs/post-update.d//flash-kernel exited with return code 1 dpkg: erreur de traitement du paquet initramfs-tools (--configure) : installed initramfs-tools package post-installation script subprocess returned error exit status 1 Des erreurs ont été rencontrées pendant l'exécution : linux-image-edge-bcm2711 linux-firmware flash-kernel initramfs-tools E: Sub-process /usr/bin/dpkg returned an error code (1) -
Thank you so much.
")
When that will work for me, I will try with overlay2.
Will a
armbian-config/System/Firmwarebe enough to get the corrected kernel, or should I reinstall the complete image?
-
Hi there,
I needed an aarch64 gitlab-runner asap, so I got rid of HyprioOs (32 bits) and installed Armbian on my Raspberry Pi 3B.
I would have loved to stay with Debian, but went with Ubuntu Focal (as it was the smallest install available).
I have a problem with Docker and `overlay2`.
Spoilersudo /usr/bin/dockerd INFO[2022-02-17T16:58:28.689286518+01:00] Starting up INFO[2022-02-17T16:58:28.699468486+01:00] parsed scheme: "unix" module=grpc INFO[2022-02-17T16:58:28.700166971+01:00] scheme "unix" not registered, fallback to default scheme module=grpc INFO[2022-02-17T16:58:28.700632176+01:00] ccResolverWrapper: sending update to cc: {[{unix:///run/containerd/containerd.sock <nil> 0 <nil>}] <nil> <nil>} module=grpc INFO[2022-02-17T16:58:28.701143371+01:00] ClientConn switching balancer to "pick_first" module=grpc INFO[2022-02-17T16:58:28.728169297+01:00] parsed scheme: "unix" module=grpc INFO[2022-02-17T16:58:28.728332109+01:00] scheme "unix" not registered, fallback to default scheme module=grpc INFO[2022-02-17T16:58:28.728427993+01:00] ccResolverWrapper: sending update to cc: {[{unix:///run/containerd/containerd.sock <nil> 0 <nil>}] <nil> <nil>} module=grpc INFO[2022-02-17T16:58:28.728491014+01:00] ClientConn switching balancer to "pick_first" module=grpc ERRO[2022-02-17T16:58:28.741652443+01:00] failed to mount overlay: no such device storage-driver=overlay2 ERRO[2022-02-17T16:58:28.741913379+01:00] exec: "fuse-overlayfs": executable file not found in $PATH storage-driver=fuse-overlayfs ERRO[2022-02-17T16:58:28.760037902+01:00] AUFS was not found in /proc/filesystems storage-driver=aufs ERRO[2022-02-17T16:58:28.769291698+01:00] failed to mount overlay: no such device storage-driver=overlay WARN[2022-02-17T16:58:28.808232811+01:00] Your kernel does not support CPU realtime scheduler WARN[2022-02-17T16:58:28.808329894+01:00] Your kernel does not support cgroup blkio weight WARN[2022-02-17T16:58:28.808379633+01:00] Your kernel does not support cgroup blkio weight_device INFO[2022-02-17T16:58:28.809312127+01:00] Loading containers: start. WARN[2022-02-17T16:58:28.828738048+01:00] Running modprobe bridge br_netfilter failed with message: modprobe: WARNING: Module bridge not found in directory /lib/modules/5.16.7-bcm2711
Would anyone know if there is anything I can do on my side to get it to work?
I mean, if that does not imply rebuilding a specific image for me, as I don't have the hardware to do so.
Thanks in advance. -
-
Thank you FurretUber, I'll try that.
-
Thank you Werner. I will try on a supported version of Armbian with another Zero and see what I get.
-
Armbianmonitor:
Hello there,
I have an Orange Pi Zero running Armbian 22.02.0-trunk.0003 Bullseye with Linux 5.10.89-sunxi.
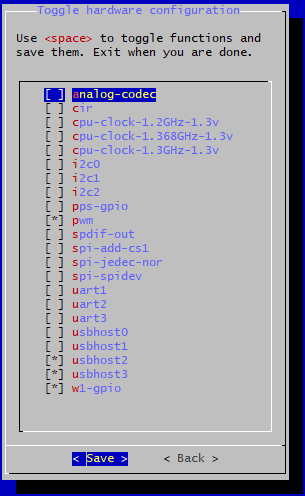
I have followed this thread about H3 and SPI, but it does not work for me. I have checked the right (?) options in armbian-config, added spi0-spidev in armbianEnv.txt.
Here is my armbianEnv.txt:verbosity=1 bootlogo=false console=serial disp_mode=1920x1080p60 overlay_prefix=sun8i-h3 overlays=i2c0 pwm spi-add-cs1 spi-jedec-nor spi-spidev usbhost2 usbhost3 spi0-spidev rootdev=UUID=1244dc6c-1888-4768-9cbd-922ca4cc3436 rootfstype=ext4 usbstoragequirks=0x2537:0x1066:u,0x2537:0x1068:uI don't have any spi subfolder in /dev.
I'm almost sure I have forgotten something really trivial, but I can't see what for the time being.Can anyone point me the obvious mistake I made?
Thanks. -
-
Oh well, it's not as easy as I thought it would be.
I can't remember on which Zero I had managed to get the PWM to work for me.
And even if I could find it, I guess it would be difficult to understand why it works, as I installed so many libraries.For the time being, on a fresh install, I can get the 7th pin to work as an output for GPIO, thus making a LED blink (with java-periphery or python-periphery).
But this very same pin can't (for me at last) work as PWM, even if it's labeled "PI3 PWM1 / PA06 / GPIO6" with the same libraries.
I also tried with the middle pin of the UART with no luck.
The OPI.GPIO PWM demo says nothing, but I can't see anything switching on.sudo python3 PWM_Demo.py turn on pwm by pressing button dimm pwm by pressing button change pwm frequency by pressing button stop pwm by reducing duty cycle to 0 by pressing button change polarity by pressing button increase duty cycle but inverted so light will dim. press button to contunue duty cycle reduced press button to contunue stop pwm (it was inverted so it shoudl be full brightness), press button to contunue remove object and deactivate pwm pin, press button to contunue poddingue@orangepizero:~/OPi.GPIO/Demo$I've seen better Sundays when I don't feel that dumb.

-
I now want to connect one or two PWM fans (a Delta BFB1012VH 46cfm and a Sunon pf40281bx-d060-s99 24.9cfm).
I guess I should use a resistor for the PWM wire, but I don't know about the RPM wire...
And should I connect the ground of the fan with the ground of the OrangePi Zero? They don't share the same voltage, so I'm kind of afraid to do so.
Any input?
Thanks. -
Great, thanks a lot to the Armbian team!
-
How to get Armbian running on a X86_64 with multiboot?
in Beginners
Posted
Hi there,
I have too many SBCs running Armbian with very recent kernels (even two Raspberry Pi 3B), and I love the consistency of my herd.
I will change job next month, and I will at last be able to have a Linux machine as my daily driver...
The thing is, I will need Windows too for video editing so that I need to keep it available when needed.
I was thinking of Manjaro or Linux Mint for the freshness of their kernels (as the laptop hardware is pretty recent), but I gave a try yesterday at Armbian on x86_64, and it went almost well.
I did not go as well as @NicoD's attempt in his latest video, but it is encouraging anyhow.
So... Is there anything like "write to NAND" for X86? How could one have a multiboot with Armbian?
Thanks.