


jkljkl1197
-
Posts
32 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Posts posted by jkljkl1197
-
-
perfect thank you @TonyMac32
-
Just to be sure the uart as been already change to uart4 on main branch and developper branch for thinkerboard? or i need to do something to change it. Thanks guy's
-
no up about this? i just want to know how i can use a raspberry pi cameras. Does i need to do something or it's plug and play?
-
-
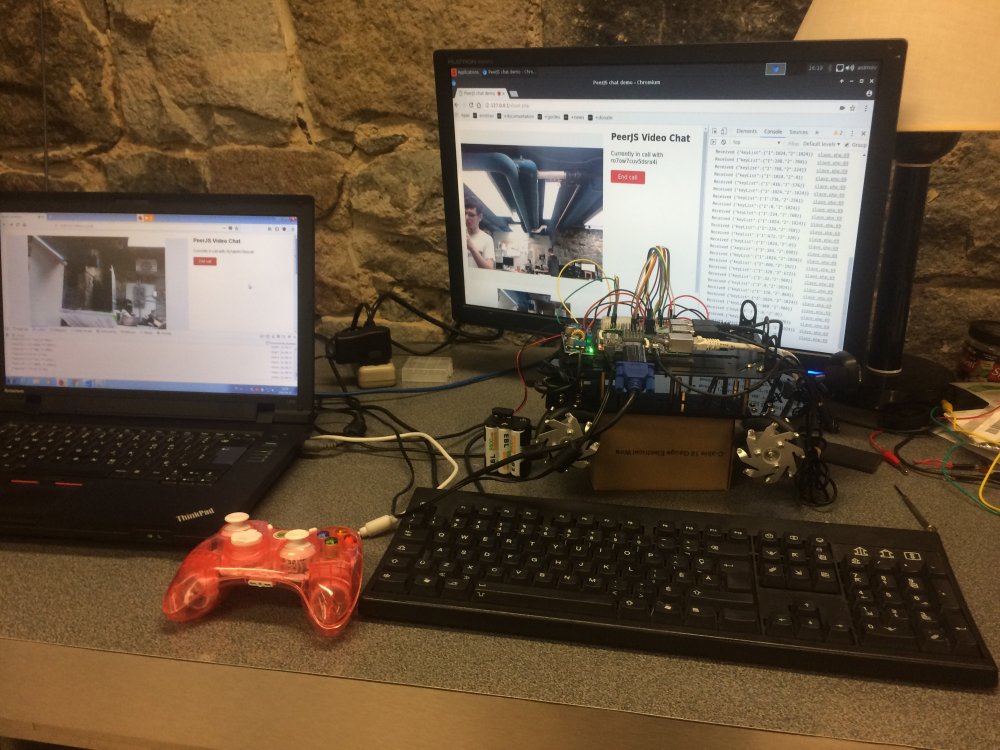
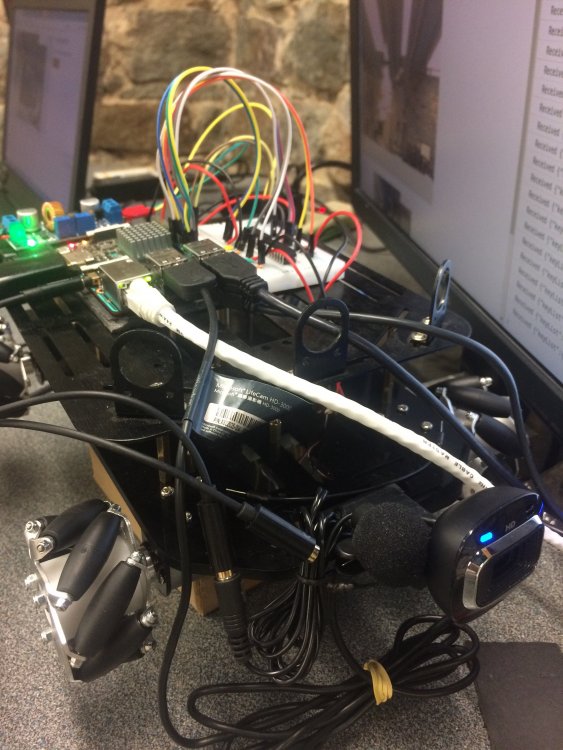
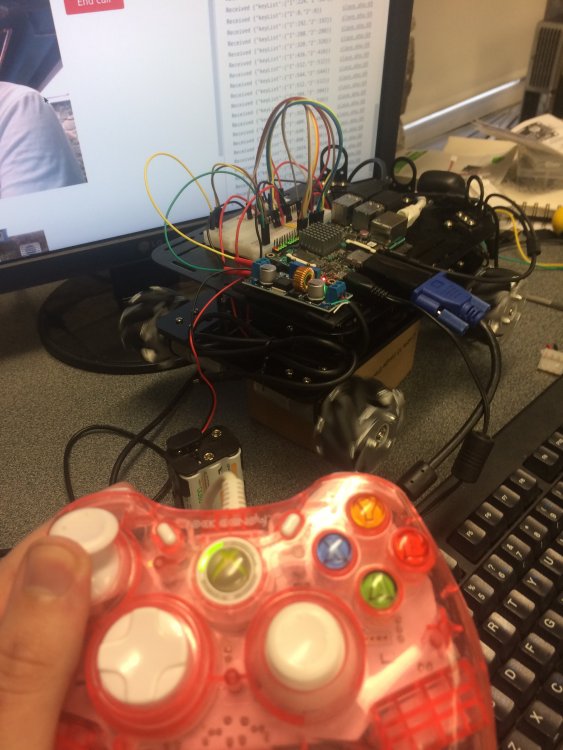
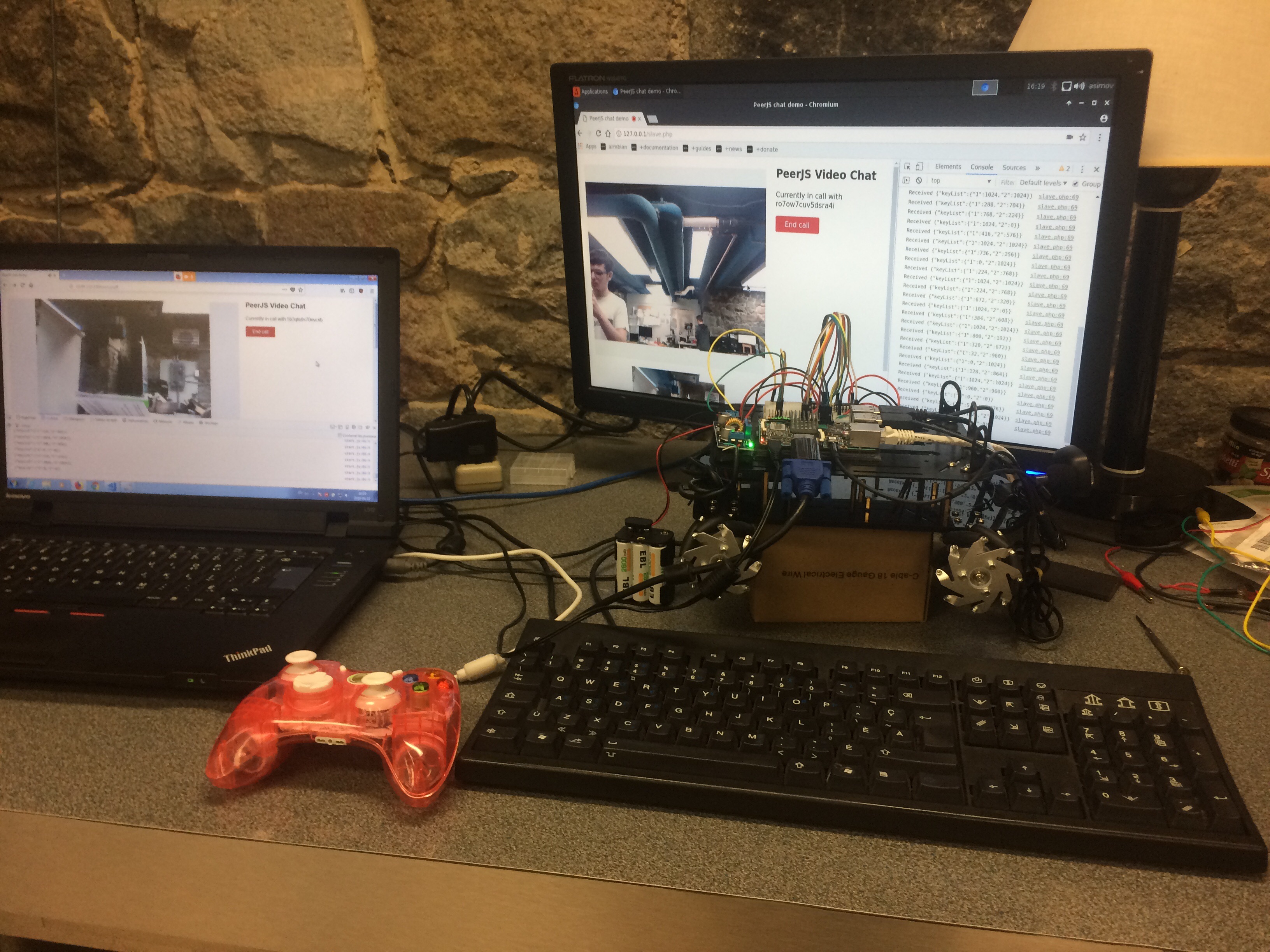
I am using webrtc (with peerjs) so I control my robot remotly and i see the his cam and he see my cam(same for the mic) it's a telecomunication project, controled with a xbox gamepad.
the goal it's to control the robot in all our school wifi network. But the routeur wifi don't communicate to each others(VLAN... can't do a server on the wifi too) so i need to add a server outside the ip network(i using a dmz server farder in the topologie network so it's accesible from all routeurs). Just to create a little server where two client can contact each other and get a link between them (the camera, mic and data don't pass tought the dmz server the server just init the connection between two client). So the tinkerboard is just a client waiting to be contact by a other client using the same server. After a client demand to get a connection with a other client they contact earch other and a get a p2p connection between them. I think later i going to add opencv and other stuff on it.
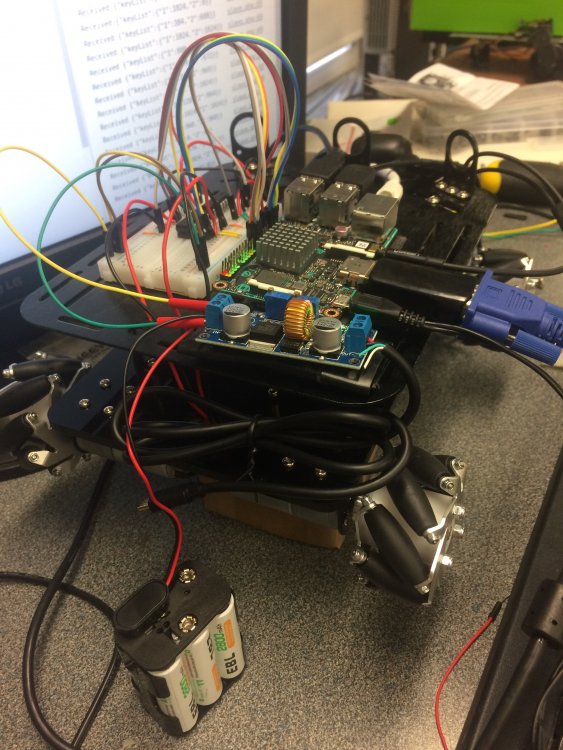
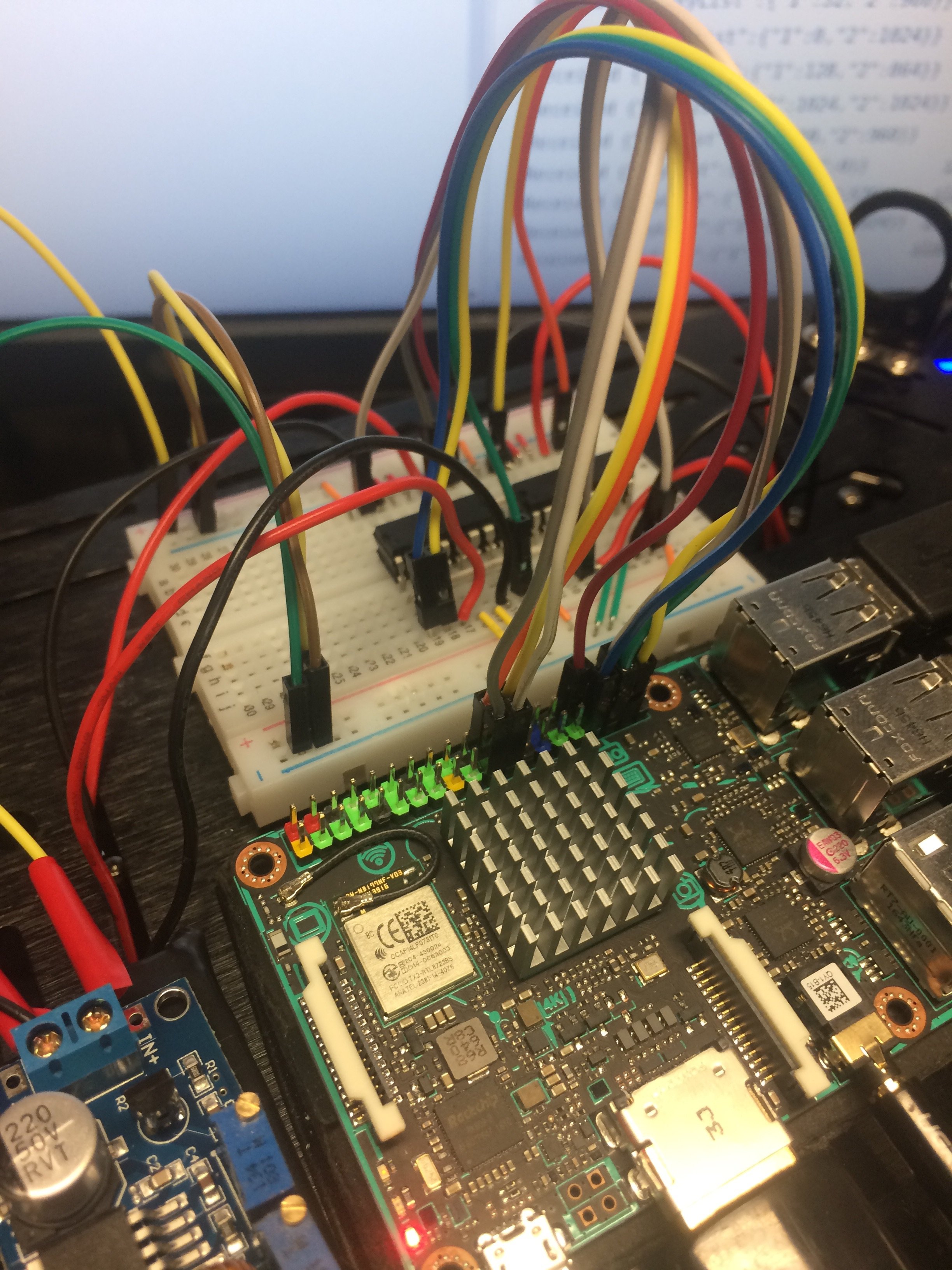
the xl4015 have a amp regulator(potentiometer 2) so i can limit the amp output of it right? I am using 4 L293D because just 2 over heating so add a other l293d over a other l293d and it's heating much less.
sorry but i never use a resistor in my life, because i don't understand well how it's work. I know it can lower voltage but it's heating much. I use a 20AWG micro usb so i don't use gpio to power it. It's more safer then use gpio when you don't understand electricity that much.and if you want to know what are these Wheels, it's "Mecanum Wheels".
@NicoD no probleme about the "misunderstanding" i just didn't explain it before
-
I get it work with my xl4015 and 6 battery in pack, it's work well now. I have try to banchmark the cpu and all is fine no drop. But i need a real battery like we use in toy cars (performance battery) because it's not working when i put my motors on the same battery pack and create a drop. Thx guy's
-
If someone have a other option i want to hear it too ^^.
-
you use this powerbank with tinkerboard?
i going to try with my other powerbank if it's work before but i think for a robot it's better to get a little battery and not a big one.
(i want to power it with a battrery for a teleconference robot) -
A 8V using a battery pack of 6 2800amp each(in futur a car battry like lipo battery or other) or i need to get a 5V phone battery or something like that.
maybe 50$ CAD. I am in a robotic club so we have much stuff. -
I try to get working a tinkerboard on a battery. I can do that with S.USV or S.USV Mobile but i don't know the difference between them. I have a xl4015 (5Amp buck convecter) but I don't really understand how it's work (i have a lm2596 too).
I have a 20AWG micro-usb too but i can power it too from gpio. So i search a quick way to get it work on a battery. I work and search on this since 5 week and i really need to get it work. Thx -
No one have new about Sony IMX219 support?
-
yeah now it's work well
damn before it's taking to me 1h30 and now 3h i need to add some cpu core to the vm -
Full os image for flashing
do not show kernel config
tinkerboard
default vendor provided legacy 3.4.x to 4.4.x
xenial
image with desktop environement
i try to delete the build folder and redownload build git do the same it's special
i am on Hyper-V with the minimal image get from doc of armbian on ubuntu studio on graphical (to compile) but it's change nothing i think, it's working before the new patch/version.
nope -
sound/usb/pcm.c: In function ‘set_sync_ep_implicit_fb_quirk’:
sound/usb/pcm.c:361:2: error: duplicate case value
case USB_ID(0x1397, 0x0002):
^~~~
sound/usb/pcm.c:352:2: note: previously used here
case USB_ID(0x1397, 0x0002):
^~~~
scripts/Makefile.build:277 : la recette pour la cible « sound/usb/pcm.o » a échouée
make[2]: *** [sound/usb/pcm.o] Erreur 1
scripts/Makefile.build:484 : la recette pour la cible « sound/usb » a échouée
make[1]: *** [sound/usb] Erreur 2
Makefile:1016 : la recette pour la cible « sound » a échouée
make: *** [sound] Erreur 2
hummm i don't know but i delete the build folder and when a i compile each time i get this error -
[ warn ] * [l][c] 220_uart4_fix.patch [ failed ]
[ warn ] * [l][c] 04-patch-4.4.114-115.patch [ failed ]
[ warn ] * [l][c] 04-patch-4.4.115-116.patch [ failed ]
[ warn ] * [l][c] 04-patch-4.4.116-117.patch [ failed ]
[ warn ] * [l][c] 04-patch-4.4.117-118.patch [ failed ]
[ warn ] * [l][c] 04-patch-4.4.118-119.patch [ failed ]
humm? -
i am for too !!!
-
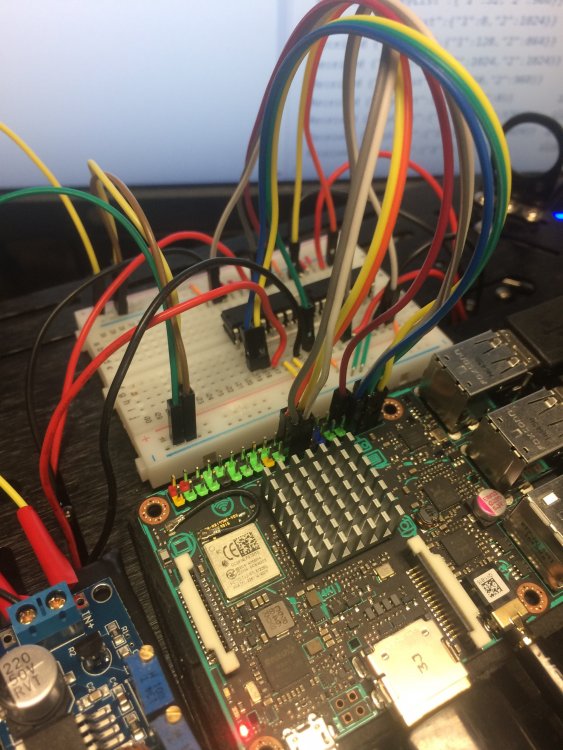
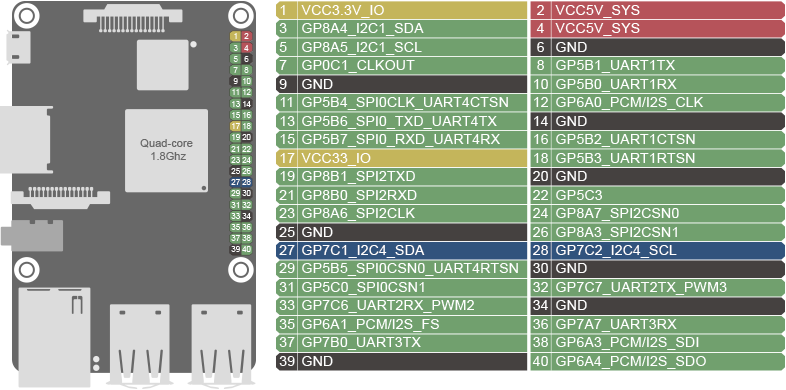
Hi, i get a probleme with the actual uart acces config by default on Uart2 (pin 32, 33), because i need to use PWM pin (use to set motor speed with a L293D) and on the board only pin 32, 33 can be use with PWM. Now i am using 32 33 pin as PWM but if the cable on these pin is connected the board doesn't boot, maybe because the uarts of u-boot use these pin and the result of un connected cable to my setup = Critical fail. When i remove the cable on pin 32 the board boot. So i need to solve that because i don't want to disconnect this cable at each start and i want to use uarts with this setup.
I need to change uart2 to uart1 or find a way to get PWM or a other pin option where it can be use with a L293D to set motor speed.Thx guy's have a nice day.
Fitzing Projet file
-
@chwe does the imx219 work? i just have this one. Thx
http://opensource.rock-chips.com/wiki_Rockchip-isp1
https://github.com/rockchip-linux/gstreamer-rockchip-extra
https://github.com/rockchip-linux/kernel/blob/release-4.4/drivers/media/i2c/imx219.c
https://github.com/rockchip-linux/kernel/blob/release-4.4/arch/arm/boot/dts/rk3288-miniarm.dts
https://github.com/rockchip-linux/rk-rootfs-build
https://github.com/rockchip-linux/rk-rootfs-build/blob/master/overlay-debug/usr/local/bin/test_camera.sh
https://github.com/rockchip-linux/kernel/issues/72 -
Just to know how can i fix this error? : [drm:dw_hdmi_rockchip_set_property] *ERROR* failed to set rockchip hdmi connector property
from a spam syslog -
No update about this thread?
if some one know how to get work this csi interface.
because i am waiting it, but i use a usb camera insted until csi work. -
the tinker board can work with vp8-9 and h264 but which one give better perfomance for webrtc? because i use webrtc on chromium and i want to know if it run better over vp8-9 or over h264 @JMCC "It will force youtube to use H264 instead of VP9, which has no acceleration with RK3288." and does the plugin force to use h264 for webrtc too or just for video on the web?
next time i have my tinker board under the hand i gonna check what is the result of this link https://www.youtube.com/html5?hl=frMSE mean "Media Source Extensions" on the youtube page, it's when you use <audio> and <video> tags on html5.
-
it's working for me too nice job !!
-
Sat Feb 24 02:30:12 UTC 2018 | Tinkerboard | 5.41 | armhf | armv7l | 4.4.115-rockchip
I have install image ubuntu and have change resolution to 1920x1080 and not working the screen say "analogique Coupure 67.5Khz / 60Hz" (flatron w2242tq). if i don't change the resolution it's work for 800x600 75Ghz and 1280x720 60Ghz but not for 1920x1080 60Ghz. I can't be sure but this screen if I remember work on vga with 1920x1080 with this converter so it should not be a hardware probleme.At fist boot i need to acces to the board with ssh because the console don't work on display and said the same message.
(I am on a 120v 2.5amp with awg 20 so it's not the probleme for me)maybe it's come from
[drm:dw_hdmi_rockchip_set_property] *ERROR* failed to set rockchip hdmi connector property
[drm:hdmi_config_hdr_infoframe] *ERROR* Not support DRM Infoframe
when I start xorg i go a error "could not found tinkerboard_dri.so" and i don't have the dri folder in lib too.
Someone can help me to solve the missing dri lib too. i am not sure if i need to compile/install the lib from rockship github or not.Now http://ix.io/QLe
but 1280x720 work ... so it's correct and not a big probleme but i want to get it work later.
I already talk about it there: https://forum.armbian.com/topic/6506-tutorial-3d-and-video-acceleration-in-rk3288-boards-with-new-44-default-kernel/?tab=comments#comment-49879 -



USB Serial Support not working
in Tinkerboard
Posted
have you see this thread ? maybe it can help you.