Search the Community
Showing results for tags 'other'.
-
Hello, I'm developing a Custom Armbian for the RSB-4411 (the motherboard that uses like the Raise3D E2). For the moment, it's in the experimental phase because I can't get it to boot. It goes CRC-ERROR when I boot into the debug port on my motherboard. Source codes Armbian build: https://github.com/AstromanGaming/build Linux Kernel: https://github.com/AstromanGaming/Linux-i.MX-Fork U-boot: https://github.com/AstromanGaming/U-boot-i.MX-Fork If someone or I manage to make it boot, that would be great! 🙂 PS: I'm new to this community, if I do something wrong, please let me know.
-
This meeting is open to anyone currently contributing or interested in helping shape the newsletter going forward. Discussion Topics Strengthening the newsletter process and its impact Expanding our contributor base (authors, vendors, community voices) Improving the flow of raw content from developers Gathering better feedback from readers Ensuring the publishing process runs smoothly We're especially looking for: Fresh ideas to make the newsletter more useful and engaging A volunteer to take on reviewing and approving the first draft before publication 📅 Meeting Details Location: Discord –> Armbian Server -> Lounge Channel Duration: ~45 minutes Looking forward to seeing you there!
-
 Would it be easy to port Armbian on the Pipo M6 Pro and integrate additional device drivers to provide support for the touchscreen, the front and back camera and the sound? https://www.geekbuying.com/item/Pipo-M6Pro-GPS-Android-4-2-RK3188-Quad-Core-1-6GHz-Tablet-PC-9-7-inch-Retina-Capacitive-Touch-Screen-2048-1536-2GB-16GB-319264.html Is this something feasible in the first place? Anybody out there who want to help me on this project?
Would it be easy to port Armbian on the Pipo M6 Pro and integrate additional device drivers to provide support for the touchscreen, the front and back camera and the sound? https://www.geekbuying.com/item/Pipo-M6Pro-GPS-Android-4-2-RK3188-Quad-Core-1-6GHz-Tablet-PC-9-7-inch-Retina-Capacitive-Touch-Screen-2048-1536-2GB-16GB-319264.html Is this something feasible in the first place? Anybody out there who want to help me on this project? -
Hi! I have an old Allwinner A10 based tablet that runs on Android. I want to install some other OS on it. I tried the instructions on linux-sunxi.org and created a page for the tablet: https://linux-sunxi.org/Softwinners_crane I extracted the FEX file from an image I got from the manufacturers a long time ago: http://github.com/linux-sunxi/sunxi-boards/pull/72/files The linux-sunxi mailing list pointed out that my tablet is similar to Topwise A721, so I used that dts file to compile u-boot and the kernel, and tried to boot it through an SD card. Trying to boot that, u-boot starts, and then gets stuck at "Starting kernel..." Then I found this: After following this and building armbian, I realised that there is no script.bin to replace anymore (I'm guessing because now we use device trees?), so unable to boot this as well. What should I do to make this work with armbian? My guess is that I need to create a new dts or correct the Topwise A721 dts (https://github.com/torvalds/linux/blob/master/arch/arm/boot/dts/allwinner/sun4i-a10-topwise-a721.dts) and then try again. The only problem is that I have no experience with device trees. Would really appreciate help on getting this to work, thanks! :)
-
Hello, Thru various and sundry means, I have acquired this unusual specimen; a ZeroDesktop MiiPC M1140. This was originally intended to be a "family desktop PC" that runs on Android Jelly Bean and was released in 2013. It looks like a TV box had a child with a NUC. The machine runs a Marvell Armada 1500 Plus processor with 1GB of RAM and 4GB of storage. The company, Zerodesktop, ran a Kickstarter campaign to fund producing these - my model is one of the Kickstarter Editions. I know that the Marvell Armada 1500 was used in the Google Chromecast 2, along with a bunch of set top boxes. ZeroDesktop no longer exists as a company, having only produced these machines between 2013-14 then going belly up. There are no software updates to the Android system available (nor any mention of the device or the Armada 1500 as a supported processor for Android distributions at all). The only resources online about this device are about 7 out of date (mostly negative) tech reviews from the era. I want to make this thing run Armbian. Does anyone have a clue how to do it? I see that there are 2 development boards made by Marvell listed here but they are vastly different processors. I'm definitely an advanced user but have never compiled my own build before, especially when the system components are so mysterious and info is unavailable like this. I am up for the challenge if anyone can assist. Thank you!
-
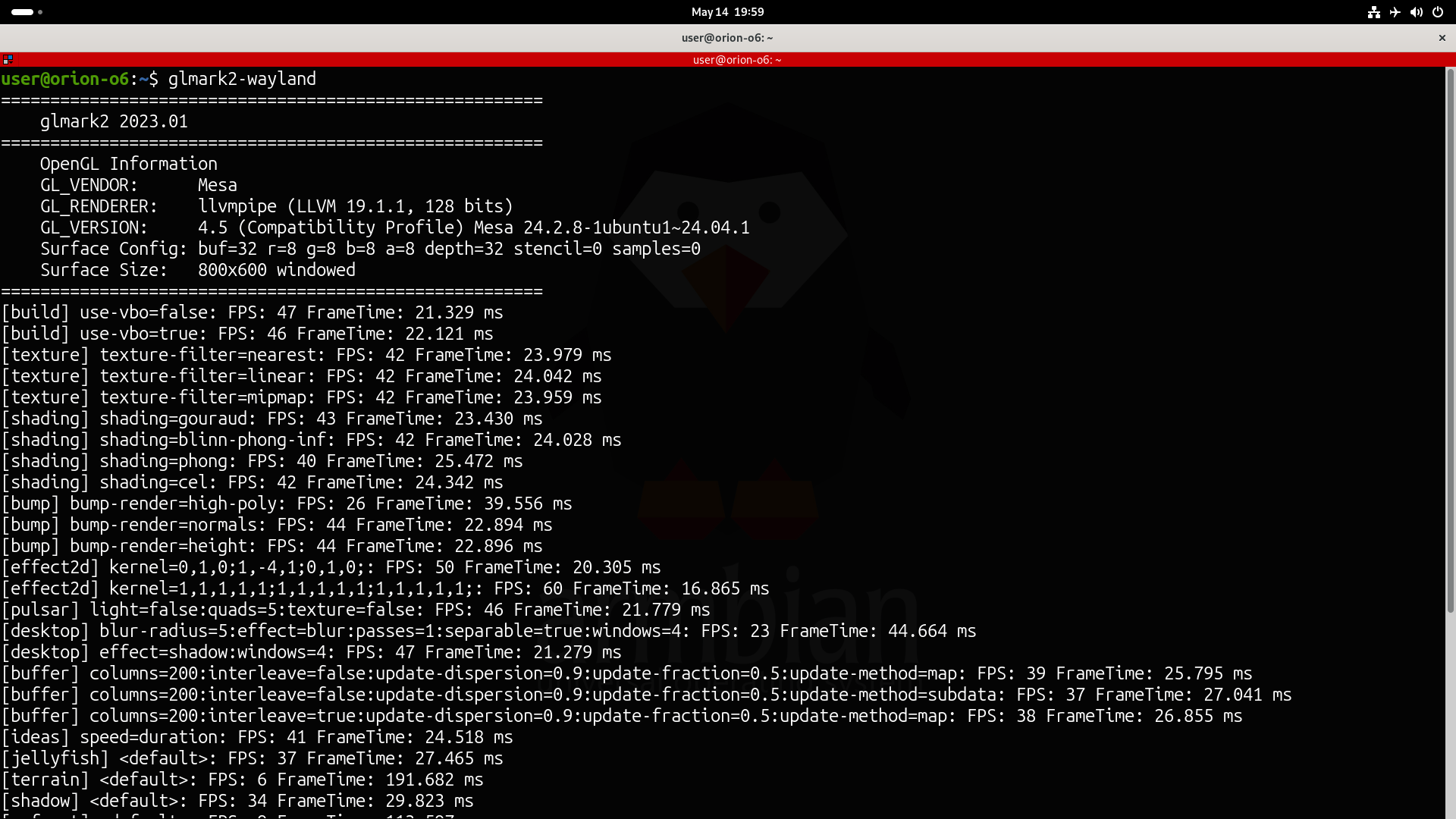
The alpha version of Armbian images for Orion O6 is available. To launch, burn to a USB flash drive, connect to Orion O6 and turn on the power (installation on NVMe has not yet been verified). The system starts automatically. Important. Image output to the monitor works only in graphical mode (in images with DE). Console output currently only works in UART, so you need a UART console or SSH connection for initial startup. Launching the desktop and displaying the image on the screen can take 30-80 seconds, depending on the speed of the media. https://disk.yandex.ru/d/gedMM0eLiURrjA Armbian-unofficial 25.05.0-trunk Noble ttyAMA2 orion-o6 login: root Password: _ _ _ __ __ _ _ _ /_\ _ _ _ __ | |__(_)__ _ _ _ ___ _ _ _ _ ___ / _|/ _(_)__(_)__ _| | / _ \| '_| ' \| '_ \ / _` | ' \___| || | ' \/ _ \ _| _| / _| / _` | | /_/ \_\_| |_|_|_|_.__/_\__,_|_||_| \_,_|_||_\___/_| |_| |_\__|_\__,_|_| v25.05 rolling for Orion O6 running Armbian Linux 6.1.44-legacy-media-cix Packages: Ubuntu stable (noble) Support: DIY (custom image) IPv4: (LAN) 192.168.1.47 (WAN) 185.213.138.150 Performance: Load: 21% Up time: 0 min Memory usage: 4% of 14.86G CPU temp: 32°C Usage of /: 40% of 14G storage/: 1% of 253M RX today: 6 MiB Commands: Configuration : armbian-config Monitoring : htop root@orion-o6:~# Disk /dev/ram14: 40 MiB, 41943040 bytes, 81920 sectors Units: sectors of 1 * 512 = 512 bytes Sector size (logical/physical): 512 bytes / 4096 bytes I/O size (minimum/optimal): 4096 bytes / 4096 bytes Disk /dev/ram15: 40 MiB, 41943040 bytes, 81920 sectors Units: sectors of 1 * 512 = 512 bytes Sector size (logical/physical): 512 bytes / 4096 bytes I/O size (minimum/optimal): 4096 bytes / 4096 bytes Disk /dev/nvme0n1: 238.47 GiB, 256060514304 bytes, 500118192 sectors Disk model: MTFDHBA256TCK-1AS1AABHA Units: sectors of 1 * 512 = 512 bytes Sector size (logical/physical): 512 bytes / 512 bytes I/O size (minimum/optimal): 512 bytes / 512 bytes Disklabel type: gpt Disk identifier: E146202C-4719-46E5-B98F-3B8E899D01FD Device Start End Sectors Size Type /dev/nvme0n1p1 2048 206847 204800 100M EFI System /dev/nvme0n1p2 206848 239615 32768 16M Microsoft reserved /dev/nvme0n1p3 239616 499049968 498810353 237.9G Microsoft basic data /dev/nvme0n1p4 499050496 500115455 1064960 520M Windows recovery environment Disk /dev/sda: 14.32 GiB, 15376000000 bytes, 30031250 sectors Disk model: Ultra Fit Units: sectors of 1 * 512 = 512 bytes Sector size (logical/physical): 512 bytes / 512 bytes I/O size (minimum/optimal): 512 bytes / 512 bytes Disklabel type: gpt Disk identifier: AC0DE29F-BE91-413F-B3A6-7A9DF368C41D Device Start End Sectors Size Type /dev/sda1 8192 532479 524288 256M EFI System /dev/sda2 532480 30031216 29498737 14.1G Linux root (ARM-64) Disk /dev/zram0: 7.43 GiB, 7979745280 bytes, 1948180 sectors Units: sectors of 1 * 4096 = 4096 bytes Sector size (logical/physical): 4096 bytes / 4096 bytes I/O size (minimum/optimal): 4096 bytes / 4096 bytes



-
Hi I've made a new kernel Auxiliary Display Driver for TM16XX and compatible LED controllers. This driver supports various LED controller chips, including TM16XX family, FD6XX family, PT6964, and HBS658. It provides support for both I2C and SPI interfaces. I wanted it to manage the hardware on the kernel space while having an easy sysfs user space interface. It also aims to reduce the code to maintain by relaying on existing kernel features instead of recoding them. Plus, you can switch to hardware i2c/spi (instead of software gpio) depending on the pins used. You can use "vfdconf-convert" to convert your existing vfd.conf to its device-tree version. Or you can use the already converted vfd.conf of https://github.com/arthur-liberman/vfd-configurations that are listed in the device table. You don't need to manually edit your device tree, the "make" command will apply the device tree source overlay to your dtb. It comes with a service written as a simple bash script. So it's easily customizable without having to write custom C code. Instructions and source code at https://github.com/jefflessard/tm16xx-display/ Could you please give it a try and report your feedback?
-
Hi everyone, I'm using the RTL8189FS WiFi module and noticed that the driver included in the current Armbian GitHub repository (https://github.com/armbian) seems to be quite outdated. I'd like to ask: - What is the current version of the RTL8189FS driver? - Is there a newer version available? Thanks in advance!
-
 Hi Gents, I would like to ask for your help or tips and tricks in the following problem... Basically to keep the long story short, I have a custom board with RK3566 and 2 GB of RAM, 32 GB Samsung emmc on it ... basically if you are familliar it is a Linxdot Helium miner which has some problems with the onboard Lora module. I had tried to flash using RKDevTool a few Debian version that I found for Rk3566 but not all of them worked properly. All the time I was able to reflash it by using RKDevTool by pressing the button while I powered up the board but after flashing the Armbian minnimal for Orange Pi3B I can't use the RKDevTool anymore, it is simply not seeing the board anymore (No device found). I have an UART 3.5mm Jack type port, I had a homemade cable so I was able to create the user at the first boot, I am able to log in, but there is no HDMI, the ethernet port is no recognized, WiFi also not recognized, I am plug in a USB Flash stick and I am not seeing it in the lsblk command output, so basically I have now a very basic board. (I know, I am stupid, but I was thinking that I can't damage it because the RKDevTool was working fine under all previous circumstances). My question would be, if there is any possibility somehow to restore the functionality to be able to boot it in MaskMode for the RKDevTool or any other solution to make at least the Ethernet and USB ports to work? There are no other button, just 2, one reset and one user button on it. All the time I had to keep pressed the user button in order to be detected by the RK tool. There are no jumpers on the board (at least I can't find them) which I can short to stop the emmc from booting or similar things Many thanks in advance ! The booting process: ▒▒▒DDR V1.18 f366f69a7d typ 23/07/17-15:48:58 ln LP4/4x derate en, other dram:1x trefi ddrconfig:15 DDR4, 324MHz BW=32 Col=10 Bk=4 BG=2 CS0 Row=16 CS=1 Die BW=16 Size=2048MB tdqss: cs0 dqs0: 192ps, dqs1: 144ps, dqs2: 96ps, dqs3: 96ps, change to: 324MHz clk skew:0x8d change to: 528MHz clk skew:0x8d change to: 780MHz clk skew:0x8d change to: 1056MHz(final freq) clk skew:0x8d PHY drv:clk:37,ca:37,DQ:37,odt:139 vrefinner:50%, vrefout:61% dram drv:34,odt:120 cs 0: the read training result: DQS0:0x3c, DQS1:0x39, DQS2:0x36, DQS3:0x3b, min : 0x7 0xa 0xb 0x8 0x2 0x4 0x4 0x2 , 0x3 0x7 0x1 0x4 0x4 0x6 0x8 0x2 , 0x5 0x6 0x3 0x6 0x2 0x1 0x2 0x4 , 0x8 0x6 0x6 0x0 0x5 0x8 0x9 0x6 , mid :0x24 0x27 0x28 0x25 0x1f 0x21 0x21 0x1f ,0x21 0x23 0x1e 0x22 0x22 0x23 0x24 0x1f , 0x21 0x23 0x20 0x22 0x1f 0x1d 0x1f 0x21 ,0x26 0x23 0x23 0x1d 0x22 0x26 0x26 0x23 , max :0x42 0x45 0x46 0x43 0x3c 0x3e 0x3f 0x3c ,0x3f 0x40 0x3b 0x40 0x40 0x40 0x41 0x3d , 0x3e 0x40 0x3e 0x3f 0x3c 0x3a 0x3d 0x3e ,0x44 0x40 0x41 0x3a 0x40 0x44 0x44 0x41 , range:0x3b 0x3b 0x3b 0x3b 0x3a 0x3a 0x3b 0x3a ,0x3c 0x39 0x3a 0x3c 0x3c 0x3a 0x39 0x3b , 0x39 0x3a 0x3b 0x39 0x3a 0x39 0x3b 0x3a ,0x3c 0x3a 0x3b 0x3a 0x3b 0x3c 0x3b 0x3b , the write training result: DQS0:0xa6, DQS1:0xa0, DQS2:0x99, DQS3:0x99, min :0x8c 0x92 0x90 0x8f 0x88 0x89 0x8a 0x89 0x8f ,0x85 0x89 0x84 0x89 0x89 0x8b 0x8b 0x85 0x85 , 0x84 0x85 0x84 0x85 0x83 0x81 0x83 0x85 0x82 ,0x7f 0x7d 0x7c 0x7a 0x81 0x81 0x82 0x7e 0x7e , mid :0xa8 0xab 0xab 0xa9 0xa1 0xa4 0xa3 0xa2 0xa9 ,0x9f 0xa2 0x9e 0xa3 0xa2 0xa3 0xa4 0x9f 0x9f , 0x9e 0x9e 0x9f 0xa0 0x9c 0x9b 0x9a 0x9c 0x9d ,0x9b 0x97 0x97 0x95 0x9a 0x9c 0x9c 0x9a 0x99 , max :0xc5 0xc5 0xc7 0xc3 0xbb 0xc0 0xbc 0xbb 0xc4 ,0xba 0xbb 0xb8 0xbd 0xbb 0xbc 0xbe 0xba 0xb9 , 0xb9 0xb8 0xba 0xbb 0xb6 0xb5 0xb2 0xb4 0xb8 ,0xb7 0xb2 0xb3 0xb0 0xb3 0xb7 0xb6 0xb6 0xb5 , range:0x39 0x33 0x37 0x34 0x33 0x37 0x32 0x32 0x35 ,0x35 0x32 0x34 0x34 0x32 0x31 0x33 0x35 0x34 , 0x35 0x33 0x36 0x36 0x33 0x34 0x2f 0x2f 0x36 ,0x38 0x35 0x37 0x36 0x32 0x36 0x34 0x38 0x37 , out U-Boot SPL 2023.10-rc4-armbian (Feb 10 2024 - 01:24:45 +0000) Trying to boot from MMC1 ## Checking hash(es) for config config-1 ... OK ## Checking hash(es) for Image atf-1 ... sha256+ OK ## Checking hash(es) for Image u-boot ... sha256+ OK ## Checking hash(es) for Image fdt-1 ... sha256+ OK ## Checking hash(es) for Image atf-2 ... sha256+ OK ## Checking hash(es) for Image atf-3 ... sha256+ OK ## Checking hash(es) for Image atf-4 ... sha256+ OK ## Checking hash(es) for Image atf-5 ... sha256+ OK ## Checking hash(es) for Image atf-6 ... sha256+ OK INFO: Preloader serial: 2 NOTICE: BL31: v2.3():v2.3-607-gbf602aff1:cl NOTICE: BL31: Built : 10:16:03, Jun 5 2023 INFO: GICv3 without legacy support detected. INFO: ARM GICv3 driver initialized in EL3 INFO: pmu v1 is valid 220114 INFO: dfs DDR fsp_param[0].freq_mhz= 1056MHz INFO: dfs DDR fsp_param[1].freq_mhz= 324MHz INFO: dfs DDR fsp_param[2].freq_mhz= 528MHz INFO: dfs DDR fsp_param[3].freq_mhz= 780MHz INFO: Using opteed sec cpu_context! INFO: boot cpu mask: 0 INFO: BL31: Initializing runtime services WARNING: No OPTEE provided by BL2 boot loader, Booting device without OPTEE initialization. SMC`s destined for OPTEE will return SMC_UNK ERROR: Error initializing runtime service opteed_fast INFO: BL31: Preparing for EL3 exit to normal world INFO: Entry point address = 0xa00000 INFO: SPSR = 0x3c9 U-Boot 2023.10-rc4-armbian (Feb 10 2024 - 01:24:45 +0000) Model: Rockchip RK3566 OPi 3B DRAM: 2 GiB PMIC: RK8090 (on=0x40, off=0x00) Core: 338 devices, 32 uclasses, devicetree: separate MMC: mmc@fe2b0000: 1, mmc@fe2c0000: 2, mmc@fe310000: 0 Loading Environment from nowhere... OK In: serial@fe660000 Out: serial@fe660000 Err: serial@fe660000 Model: Rockchip RK3566 OPi 3B Net: eth0: ethernet@fe010000 Hit any key to stop autoboot: 0 Card did not respond to voltage select! : -110 ** Booting bootflow 'mmc@fe310000.bootdev.part_1' with script Boot script loaded from mmc 0:1 204 bytes read in 12 ms (16.6 KiB/s) 8023386 bytes read in 204 ms (37.5 MiB/s) 35062272 bytes read in 767 ms (43.6 MiB/s) 166117 bytes read in 54 ms (2.9 MiB/s) Working FDT set to a100000 Failed to load '/boot/dtb/rockchip/overlay/rk35xx-fixup.scr' Unknown command 'kaslrseed' - try 'help' Moving Image from 0x2080000 to 0x2200000, end=4420000 ## Loading init Ramdisk from Legacy Image at 0a200000 ... Image Name: uInitrd Image Type: AArch64 Linux RAMDisk Image (gzip compressed) Data Size: 8023322 Bytes = 7.7 MiB Load Address: 00000000 Entry Point: 00000000 Verifying Checksum ... OK ## Flattened Device Tree blob at 0a100000 Booting using the fdt blob at 0xa100000 Working FDT set to a100000 Loading Ramdisk to 7c71d000, end 7cec3d1a ... OK ERROR: reserving fdt memory region failed (addr=0 size=0 flags=0) ERROR: reserving fdt memory region failed (addr=0 size=0 flags=0) Loading Device Tree to 000000007c68c000, end 000000007c71cfff ... OK Working FDT set to 7c68c000 Starting kernel ... Armbian_community 24.5.0-trunk.6 Bookworm ttyFIQ0 orangepi3b login:
Hi Gents, I would like to ask for your help or tips and tricks in the following problem... Basically to keep the long story short, I have a custom board with RK3566 and 2 GB of RAM, 32 GB Samsung emmc on it ... basically if you are familliar it is a Linxdot Helium miner which has some problems with the onboard Lora module. I had tried to flash using RKDevTool a few Debian version that I found for Rk3566 but not all of them worked properly. All the time I was able to reflash it by using RKDevTool by pressing the button while I powered up the board but after flashing the Armbian minnimal for Orange Pi3B I can't use the RKDevTool anymore, it is simply not seeing the board anymore (No device found). I have an UART 3.5mm Jack type port, I had a homemade cable so I was able to create the user at the first boot, I am able to log in, but there is no HDMI, the ethernet port is no recognized, WiFi also not recognized, I am plug in a USB Flash stick and I am not seeing it in the lsblk command output, so basically I have now a very basic board. (I know, I am stupid, but I was thinking that I can't damage it because the RKDevTool was working fine under all previous circumstances). My question would be, if there is any possibility somehow to restore the functionality to be able to boot it in MaskMode for the RKDevTool or any other solution to make at least the Ethernet and USB ports to work? There are no other button, just 2, one reset and one user button on it. All the time I had to keep pressed the user button in order to be detected by the RK tool. There are no jumpers on the board (at least I can't find them) which I can short to stop the emmc from booting or similar things Many thanks in advance ! The booting process: ▒▒▒DDR V1.18 f366f69a7d typ 23/07/17-15:48:58 ln LP4/4x derate en, other dram:1x trefi ddrconfig:15 DDR4, 324MHz BW=32 Col=10 Bk=4 BG=2 CS0 Row=16 CS=1 Die BW=16 Size=2048MB tdqss: cs0 dqs0: 192ps, dqs1: 144ps, dqs2: 96ps, dqs3: 96ps, change to: 324MHz clk skew:0x8d change to: 528MHz clk skew:0x8d change to: 780MHz clk skew:0x8d change to: 1056MHz(final freq) clk skew:0x8d PHY drv:clk:37,ca:37,DQ:37,odt:139 vrefinner:50%, vrefout:61% dram drv:34,odt:120 cs 0: the read training result: DQS0:0x3c, DQS1:0x39, DQS2:0x36, DQS3:0x3b, min : 0x7 0xa 0xb 0x8 0x2 0x4 0x4 0x2 , 0x3 0x7 0x1 0x4 0x4 0x6 0x8 0x2 , 0x5 0x6 0x3 0x6 0x2 0x1 0x2 0x4 , 0x8 0x6 0x6 0x0 0x5 0x8 0x9 0x6 , mid :0x24 0x27 0x28 0x25 0x1f 0x21 0x21 0x1f ,0x21 0x23 0x1e 0x22 0x22 0x23 0x24 0x1f , 0x21 0x23 0x20 0x22 0x1f 0x1d 0x1f 0x21 ,0x26 0x23 0x23 0x1d 0x22 0x26 0x26 0x23 , max :0x42 0x45 0x46 0x43 0x3c 0x3e 0x3f 0x3c ,0x3f 0x40 0x3b 0x40 0x40 0x40 0x41 0x3d , 0x3e 0x40 0x3e 0x3f 0x3c 0x3a 0x3d 0x3e ,0x44 0x40 0x41 0x3a 0x40 0x44 0x44 0x41 , range:0x3b 0x3b 0x3b 0x3b 0x3a 0x3a 0x3b 0x3a ,0x3c 0x39 0x3a 0x3c 0x3c 0x3a 0x39 0x3b , 0x39 0x3a 0x3b 0x39 0x3a 0x39 0x3b 0x3a ,0x3c 0x3a 0x3b 0x3a 0x3b 0x3c 0x3b 0x3b , the write training result: DQS0:0xa6, DQS1:0xa0, DQS2:0x99, DQS3:0x99, min :0x8c 0x92 0x90 0x8f 0x88 0x89 0x8a 0x89 0x8f ,0x85 0x89 0x84 0x89 0x89 0x8b 0x8b 0x85 0x85 , 0x84 0x85 0x84 0x85 0x83 0x81 0x83 0x85 0x82 ,0x7f 0x7d 0x7c 0x7a 0x81 0x81 0x82 0x7e 0x7e , mid :0xa8 0xab 0xab 0xa9 0xa1 0xa4 0xa3 0xa2 0xa9 ,0x9f 0xa2 0x9e 0xa3 0xa2 0xa3 0xa4 0x9f 0x9f , 0x9e 0x9e 0x9f 0xa0 0x9c 0x9b 0x9a 0x9c 0x9d ,0x9b 0x97 0x97 0x95 0x9a 0x9c 0x9c 0x9a 0x99 , max :0xc5 0xc5 0xc7 0xc3 0xbb 0xc0 0xbc 0xbb 0xc4 ,0xba 0xbb 0xb8 0xbd 0xbb 0xbc 0xbe 0xba 0xb9 , 0xb9 0xb8 0xba 0xbb 0xb6 0xb5 0xb2 0xb4 0xb8 ,0xb7 0xb2 0xb3 0xb0 0xb3 0xb7 0xb6 0xb6 0xb5 , range:0x39 0x33 0x37 0x34 0x33 0x37 0x32 0x32 0x35 ,0x35 0x32 0x34 0x34 0x32 0x31 0x33 0x35 0x34 , 0x35 0x33 0x36 0x36 0x33 0x34 0x2f 0x2f 0x36 ,0x38 0x35 0x37 0x36 0x32 0x36 0x34 0x38 0x37 , out U-Boot SPL 2023.10-rc4-armbian (Feb 10 2024 - 01:24:45 +0000) Trying to boot from MMC1 ## Checking hash(es) for config config-1 ... OK ## Checking hash(es) for Image atf-1 ... sha256+ OK ## Checking hash(es) for Image u-boot ... sha256+ OK ## Checking hash(es) for Image fdt-1 ... sha256+ OK ## Checking hash(es) for Image atf-2 ... sha256+ OK ## Checking hash(es) for Image atf-3 ... sha256+ OK ## Checking hash(es) for Image atf-4 ... sha256+ OK ## Checking hash(es) for Image atf-5 ... sha256+ OK ## Checking hash(es) for Image atf-6 ... sha256+ OK INFO: Preloader serial: 2 NOTICE: BL31: v2.3():v2.3-607-gbf602aff1:cl NOTICE: BL31: Built : 10:16:03, Jun 5 2023 INFO: GICv3 without legacy support detected. INFO: ARM GICv3 driver initialized in EL3 INFO: pmu v1 is valid 220114 INFO: dfs DDR fsp_param[0].freq_mhz= 1056MHz INFO: dfs DDR fsp_param[1].freq_mhz= 324MHz INFO: dfs DDR fsp_param[2].freq_mhz= 528MHz INFO: dfs DDR fsp_param[3].freq_mhz= 780MHz INFO: Using opteed sec cpu_context! INFO: boot cpu mask: 0 INFO: BL31: Initializing runtime services WARNING: No OPTEE provided by BL2 boot loader, Booting device without OPTEE initialization. SMC`s destined for OPTEE will return SMC_UNK ERROR: Error initializing runtime service opteed_fast INFO: BL31: Preparing for EL3 exit to normal world INFO: Entry point address = 0xa00000 INFO: SPSR = 0x3c9 U-Boot 2023.10-rc4-armbian (Feb 10 2024 - 01:24:45 +0000) Model: Rockchip RK3566 OPi 3B DRAM: 2 GiB PMIC: RK8090 (on=0x40, off=0x00) Core: 338 devices, 32 uclasses, devicetree: separate MMC: mmc@fe2b0000: 1, mmc@fe2c0000: 2, mmc@fe310000: 0 Loading Environment from nowhere... OK In: serial@fe660000 Out: serial@fe660000 Err: serial@fe660000 Model: Rockchip RK3566 OPi 3B Net: eth0: ethernet@fe010000 Hit any key to stop autoboot: 0 Card did not respond to voltage select! : -110 ** Booting bootflow 'mmc@fe310000.bootdev.part_1' with script Boot script loaded from mmc 0:1 204 bytes read in 12 ms (16.6 KiB/s) 8023386 bytes read in 204 ms (37.5 MiB/s) 35062272 bytes read in 767 ms (43.6 MiB/s) 166117 bytes read in 54 ms (2.9 MiB/s) Working FDT set to a100000 Failed to load '/boot/dtb/rockchip/overlay/rk35xx-fixup.scr' Unknown command 'kaslrseed' - try 'help' Moving Image from 0x2080000 to 0x2200000, end=4420000 ## Loading init Ramdisk from Legacy Image at 0a200000 ... Image Name: uInitrd Image Type: AArch64 Linux RAMDisk Image (gzip compressed) Data Size: 8023322 Bytes = 7.7 MiB Load Address: 00000000 Entry Point: 00000000 Verifying Checksum ... OK ## Flattened Device Tree blob at 0a100000 Booting using the fdt blob at 0xa100000 Working FDT set to a100000 Loading Ramdisk to 7c71d000, end 7cec3d1a ... OK ERROR: reserving fdt memory region failed (addr=0 size=0 flags=0) ERROR: reserving fdt memory region failed (addr=0 size=0 flags=0) Loading Device Tree to 000000007c68c000, end 000000007c71cfff ... OK Working FDT set to 7c68c000 Starting kernel ... Armbian_community 24.5.0-trunk.6 Bookworm ttyFIQ0 orangepi3b login:
-
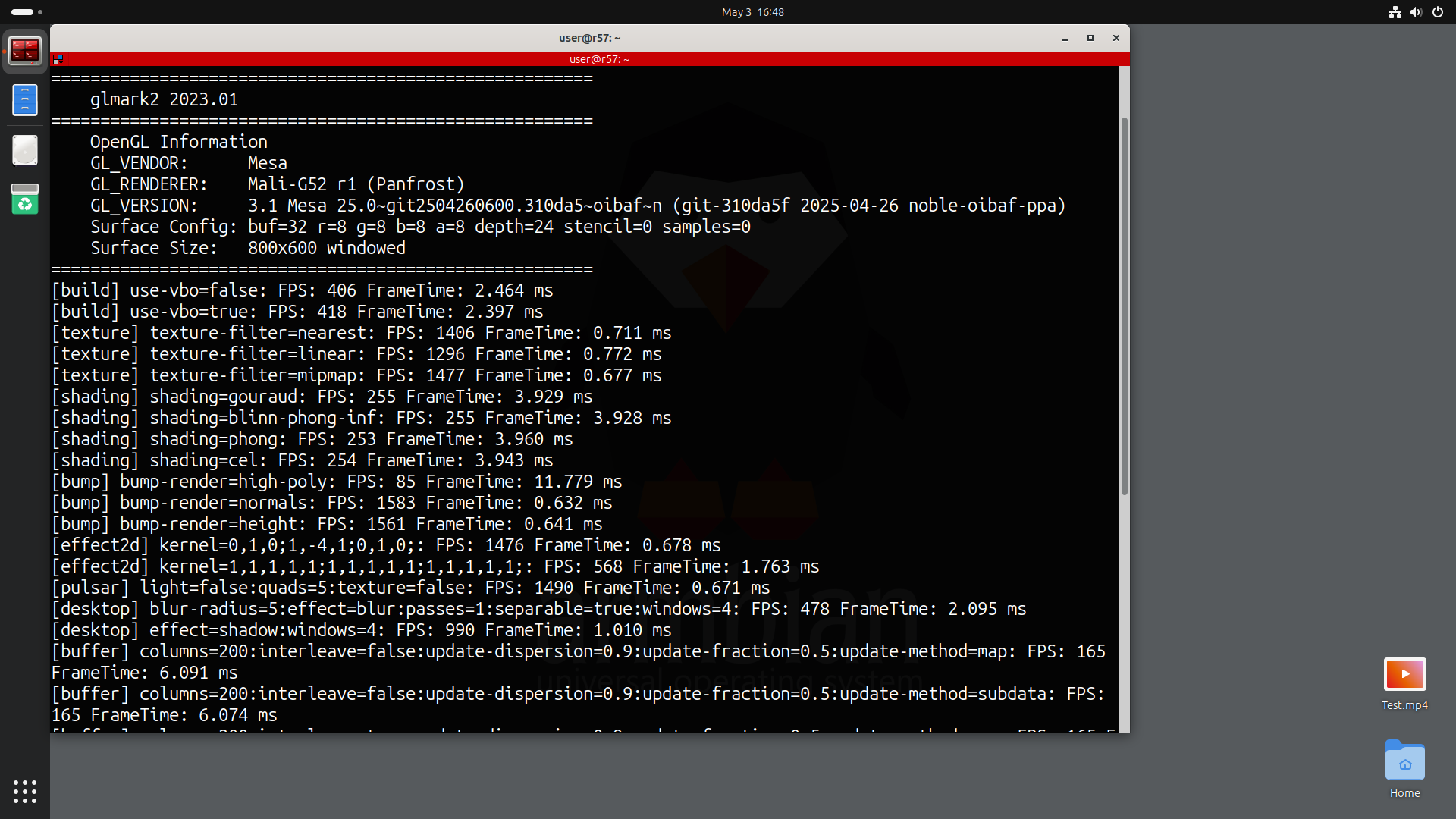
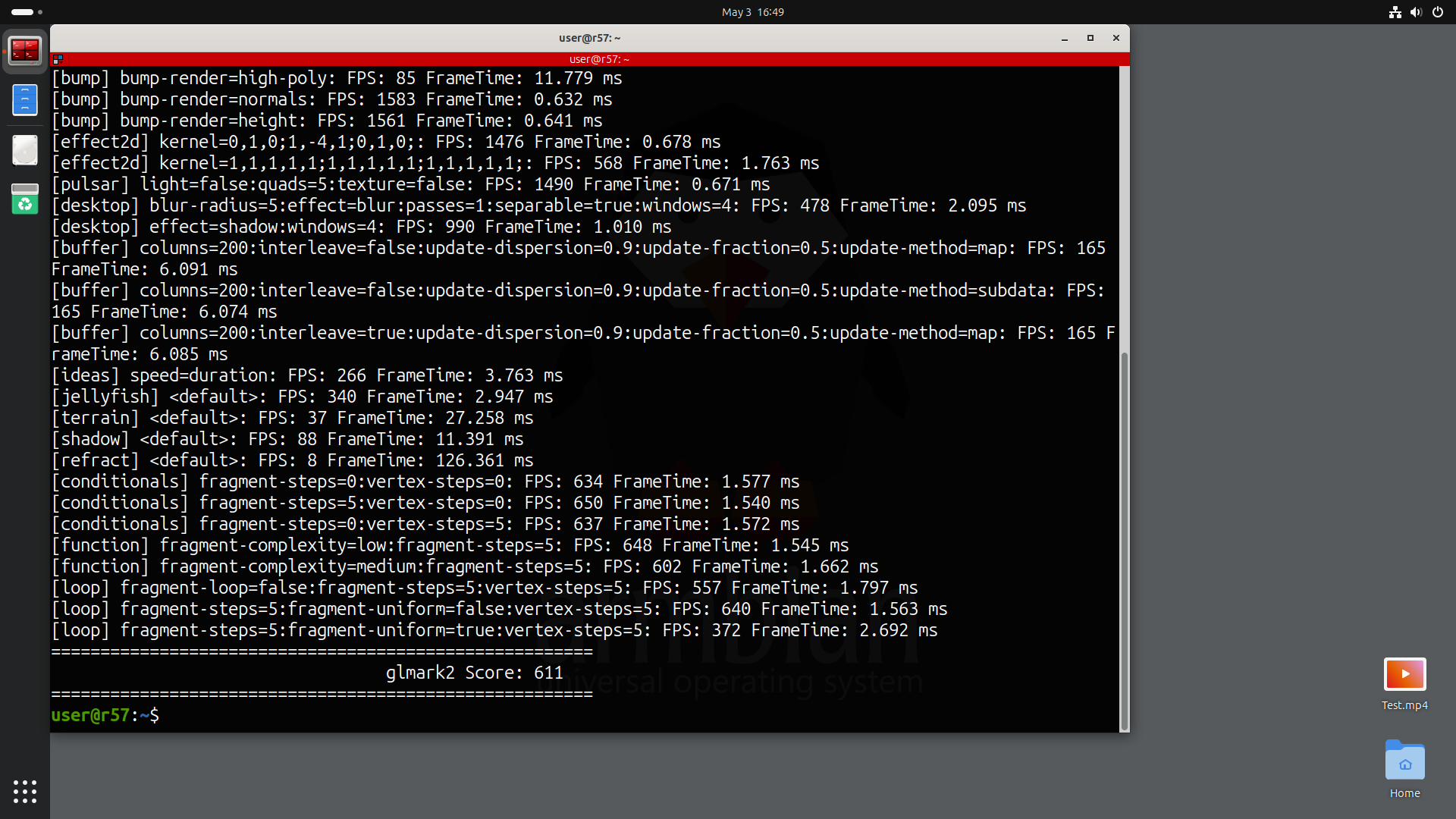
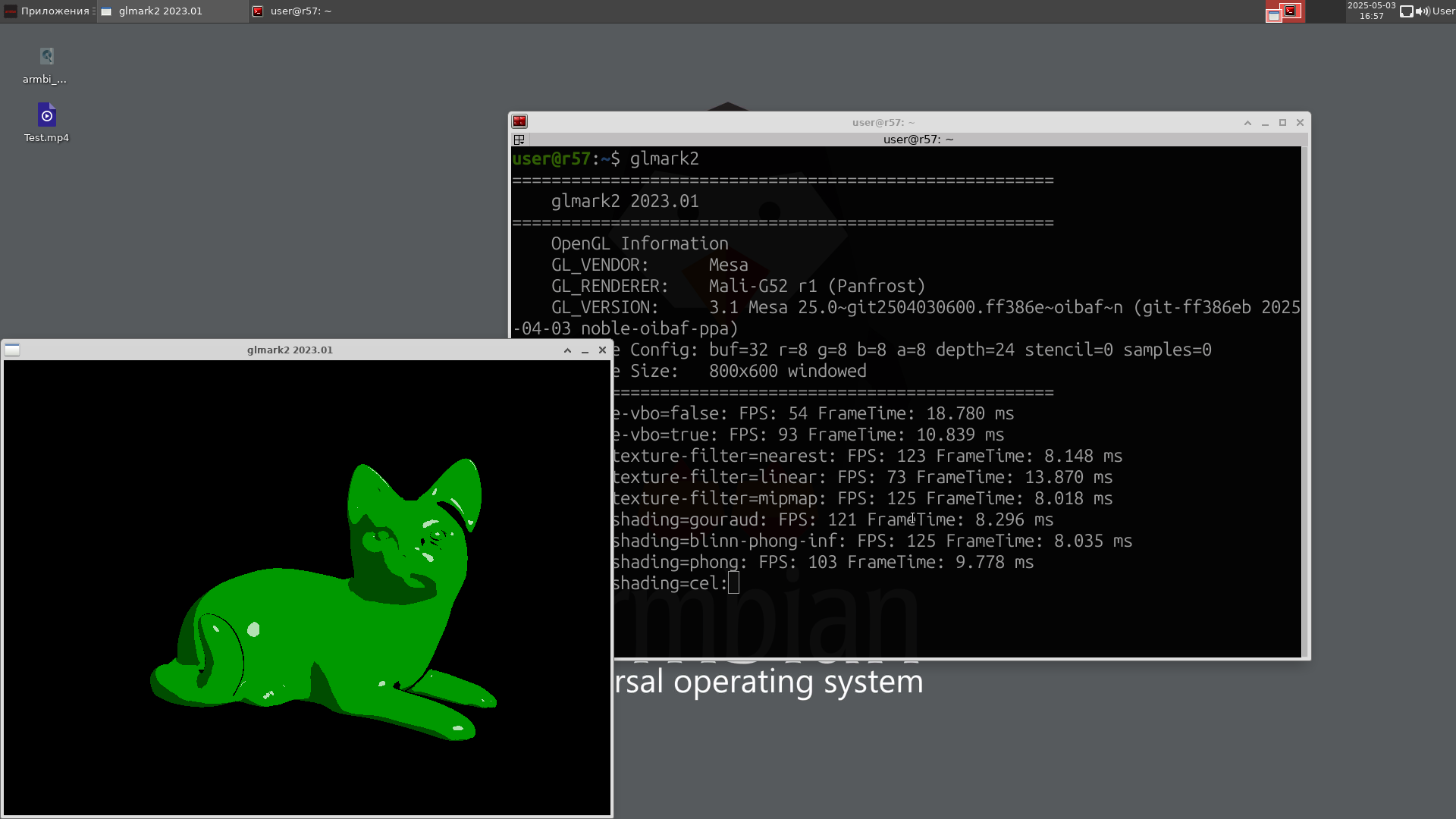
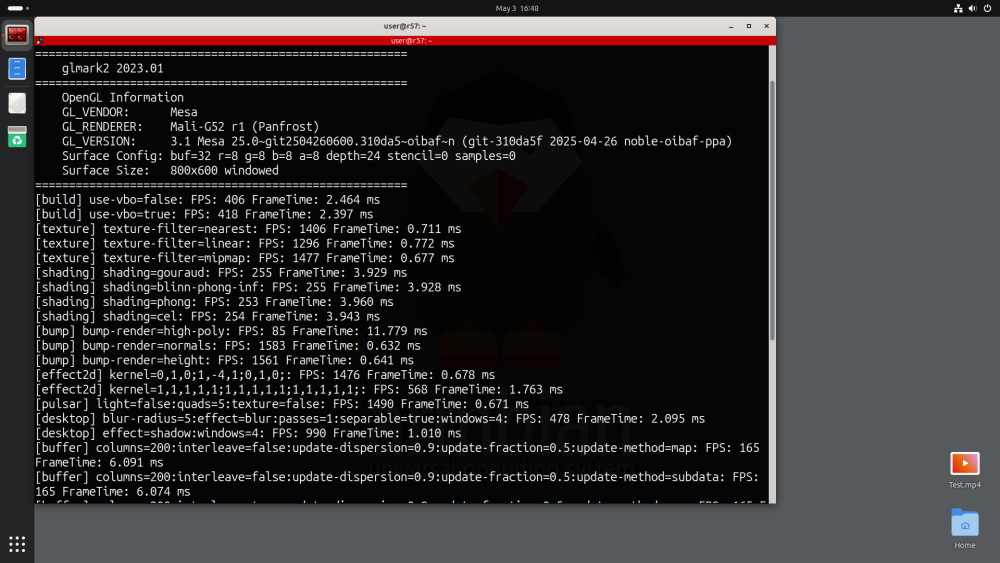
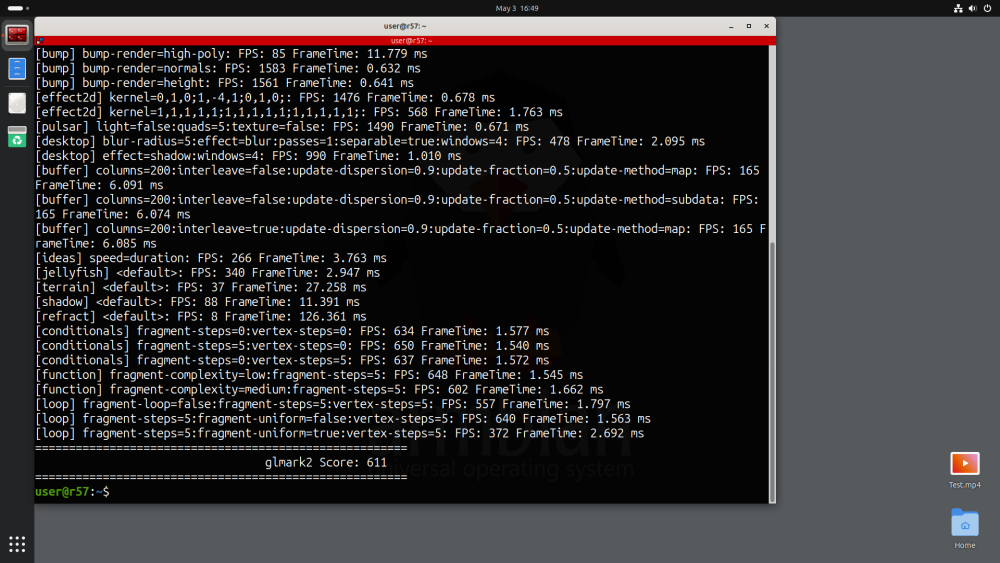
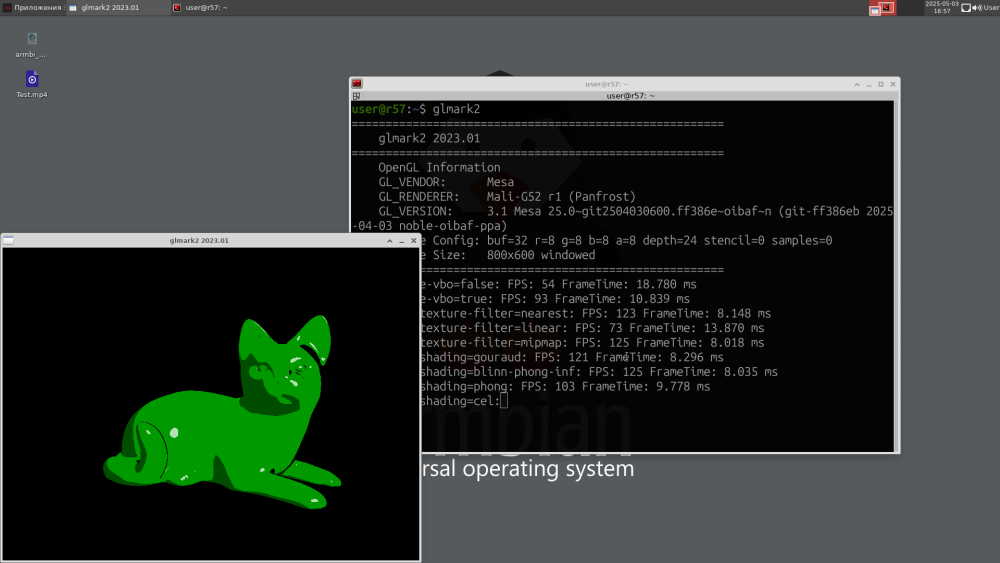
The alpha version of Armbian images for R57 with kernel edge 6.15 is now available Kernel is powered by HW panfrost acceleration on Gnome (wayland) and on XFCE (x11). Please note that in this version, the primary settings are enabled on the UART console, and to use the keyboard, you need to log in as ROOT with the password 1234 https://disk.yandex.ru/d/1M9FUcTqn5kEOw offtopic Libreelec for Mekotronics R57 https://forum.libreelec.tv/thread/20823-unofficial-le-for-rk356x-rk3328-rk3399-rk3588-s-rk3576/?postID=199809#post199809 Armbian 25.04 Noble ttyS0 r57 login: root Password: ____ ____ _____ | _ \| ___|___ | | |_) |___ \ / / | _ < ___) |/ / |_| \_\____//_/ Welcome to Armbian 25.04 Noble with bleeding edge Linux 6.15.0-rc1-station-m3-p No end-user support: built from trunk System load: 23% Up time: 2 min Memory usage: 14% of 3.81G IP: 192.168.1.28 Usage of /: 36% of 14G [ 8 security updates available, 15 updates total: apt upgrade ] Last check: 2025-05-03 16:41 [ General system configuration (beta): armbian-config ] root@r57:~# neofetch -------- █ █ █ █ █ █ █ █ █ █ █ OS: Armbian (25.04) aarch64 ███████████████████████ Host: Blueberry RK3576 EDGE V10 Board ▄▄██ ██▄▄ Kernel: 6.15.0-rc1-station-m3-p ▄▄██ ███████████ ██▄▄ Uptime: 2 mins ▄▄██ ██ ██ ██▄▄ Packages: 1509 (dpkg) ▄▄██ ██ ██ ██▄▄ Shell: bash 5.2.21 ▄▄██ ██ ██ ██▄▄ Resolution: 1920x1080 ▄▄██ █████████████ ██▄▄ Terminal: /dev/ttyS0 ▄▄██ ██ ██ ██▄▄ CPU: (8) @ 2.208GHz ▄▄██ ██ ██ ██▄▄ Memory: 786MiB / 3900MiB ▄▄██ ██ ██ ██▄▄ ▄▄██ ██▄▄ ███████████████████████ █ █ █ █ █ █ █ █ █ █ █ root@r57:~#
-
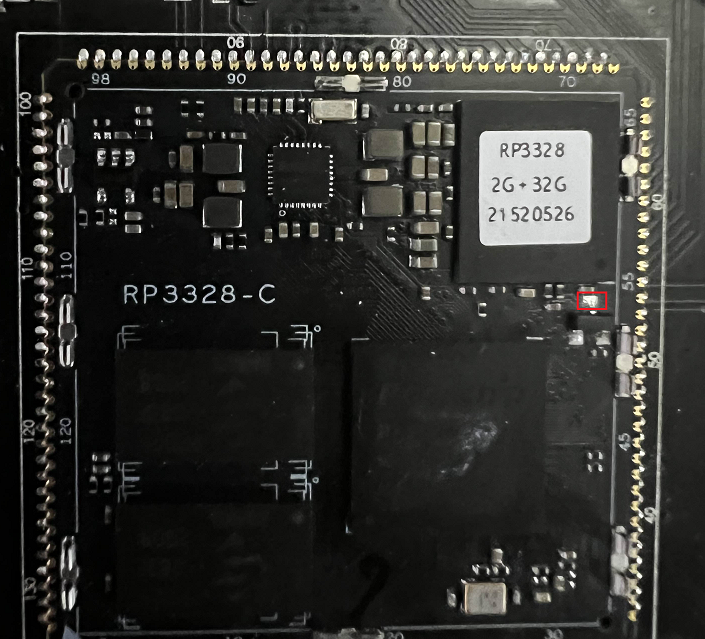
Hello Everyone I have added Armbian for the Heltec HT-M2808 Helium Miner https://github.com/armbian/build/pull/6989#event-13647037453 https://heltec.org/project/ht-m2808/ To Compile ./compile.sh build BOARD=rk3328-heltec BRANCH=current BUILD_DESKTOP=no BUILD_MINIMAL=no EXPERT=no KERNEL_CONFIGURE=yes KERNEL_GIT=shallow RELEASE=bookworm You can obviously decide to go with a desktop environment (board has no HDMI) or use a different release. How to Flash 1) Install Rockchip Flash Tools 2) Download bootloader (rk3328_loader_ddr333_v1.16.250.bin) attached here. 3) Boot device into LOADER mode. Plug USB Cable in to back of the unit, powered off. On the back of the device. Use a small pin and hold the reset button (unit powered off) THEN insert the power cable while the reset button is pressed 4) Follow the flash procedure found here. Maskrom Pin If you get stuck and need to reflash, there's a good chance holding the reset button will not work to get back into LOADER mode. To boot directly to MASKROM, you can short this pin Needed 1) Wifi/BT does not work currently 2) SPI not recognized 3) LEDs not working 4) Likely other things, but the OS is 90% functional. rk3328_loader_ddr333_v1.16.250.bin
-
Hi, I wanted to install Armbian to my old Asus eee PC. So I made live USB containing the .iso and boot from there. I can login as root fine, but when running armbian-install, I only see the option of installing to sdb (my USB drive), but not to my sda (the laptop local drive). I am not sure what's the problem. Do I have to do something to the partition in sda? Currently Alpine Linux is installed in the local drive. Previous installation was Lubuntu (14, I think?). I want to run pi-hole and there are not many supported OSes for pi-hole that still support x86, so I would like to make it work. Armbian version: Armbian 25.5.1 Bookworm Minimal
-
I’m using an Android TV Box X96 X6. Right now, I want to find a way to install Armbian on it, but I haven’t been able to figure it out yet. I’d appreciate any help or guidance from the community.
-
Windows wont let me edit/access the SD card once the iso has been written to it. Any help?
-
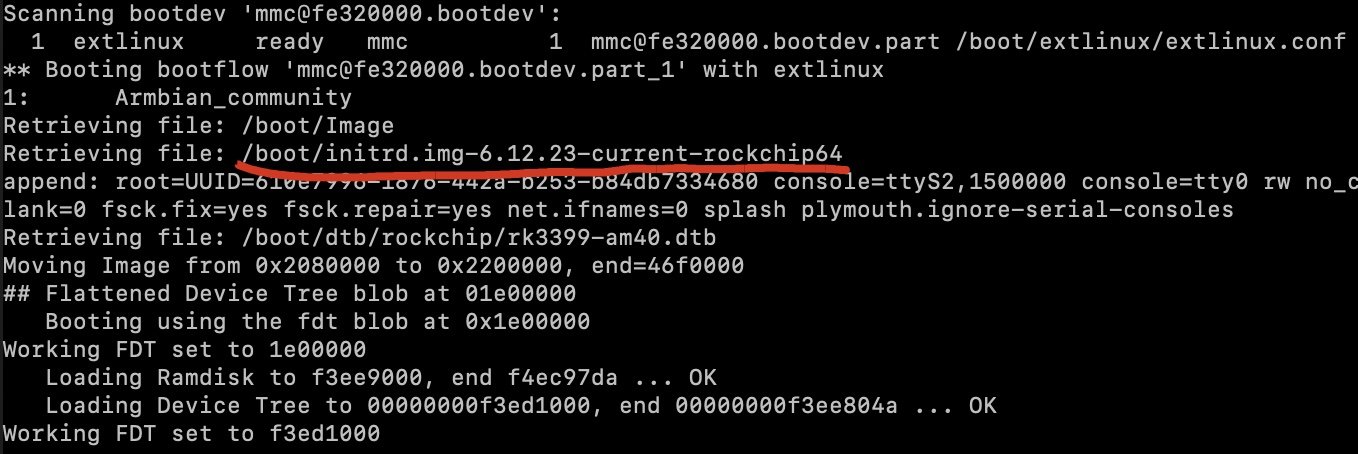
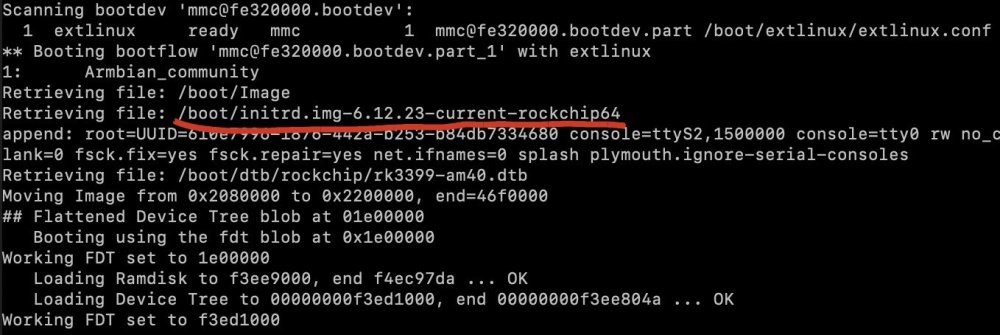
Since u-boot can deal with the original initrd.img, do we still need to convert it into uImage?
-
Hi, I tried your Debian/minimal/IOT for NanoPi 5RC, it's great, I would like to use it. However the RTL8822CE driver only exposes wlan0 and there are no parameters to set, and I need two wlans. For reference there are two wlans available in the core debian image from FriendlyARM/ELEC. Best regards.
-
Is anyone still playing with this board? When the CPU microcode bur came out, interest in this board immediately died down and in my opinion it's a real shame. I can understand in operational and production scenarios that if malicious code is injected the attacker can take control of the machine but it's a pretty difficult scenario to implement. I tried to load the latest armbian builds but I couldn't boot. As for performance, I have to say that with the official sipeed image I'm not bad even if it's not a distro but a debian image optimized by the sipeed team. I also believe in this case that there are no maintainers who can follow the armbian community release of this board, what a pity. What other image could I use? Thanks to everyone
-
 Hello dear comminuty, I have spent the last few days trying to get Hardware-Accelerated Video Decoding Encoding to work on the H618. I have tried everything but it does not work. ffmpeg -input_format mjpeg -video_size 1920x1080 -i /dev/video1 -c:v cedrus264 -f rtsp rtsp://localhost:$RTSP_PORT/$MTX_PATH my goal is to output a rtsp stream from a camera. But I get this ERROR: [cedrus264 @ 0xaaaae53e5170] VE Open error. Error initializing output stream 0:0 -- Error while opening encoder for output stream #0:0 - maybe incorrect parameters such as bit_rate, rate, width or height sudo ffmpeg -f v4l2 -video_size 1280x720 -i /dev/video1 -c:v cedrus264 -pix_fmt nv12 test1.mp4 ffmpeg version git-2021-10-01-afd516b Copyright (c) 2000-2021 the FFmpeg developers built with gcc 12 (Debian 12.2.0-14) configuration: --prefix=/usr --enable-nonfree --enable-gpl --enable-version3 --enable-vdpau --enable-libx264 --enable-libmp3lame --enable-libpulse --enable-libv4l2 libavutil 57. 7.100 / 57. 7.100 libavcodec 59. 9.101 / 59. 9.101 libavformat 59. 5.100 / 59. 5.100 libavdevice 59. 0.101 / 59. 0.101 libavfilter 8. 10.100 / 8. 10.100 libswscale 6. 1.100 / 6. 1.100 libswresample 4. 0.100 / 4. 0.100 libpostproc 56. 0.100 / 56. 0.100 Input #0, video4linux2,v4l2, from '/dev/video1': Duration: N/A, start: 2315.045127, bitrate: 147456 kb/s Stream #0:0: Video: rawvideo (YUY2 / 0x32595559), yuyv422, 1280x720, 147456 kb/s, 10 fps, 10 tbr, 1000k tbn Stream mapping: Stream #0:0 -> #0:0 (rawvideo (native) -> h264 (cedrus264)) Press [q] to stop, [?] for help [cedrus264 @ 0xaaaae53e5170] VE Open error. Error initializing output stream 0:0 -- Error while opening encoder for output stream #0:0 - maybe incorrect parameters such as bit_rate, rate, width or height Conversion failed! It was a hard way for me to get compile FFmpeg with Cedrus I have to say that I am new to Linux. Therefore I hope that someone can give me a detailed instruction on how to finally get it running. lsmod | grep cedrus sunxi_cedrus 45056 0 videobuf2_dma_contig 24576 1 sunxi_cedrus v4l2_mem2mem 36864 1 sunxi_cedrus videobuf2_v4l2 24576 3 sunxi_cedrus,uvcvideo,v4l2_mem2mem videobuf2_common 49152 7 sunxi_cedrus,videobuf2_vmalloc,videobuf2_dma_contig,videobuf2_v4l2,uvcvideo,v4l2_mem2mem,videobuf2_memops videodev 204800 5 sunxi_cedrus,videobuf2_v4l2,uvcvideo,videobuf2_common,v4l2_mem2mem mc 53248 6 sunxi_cedrus,videodev,videobuf2_v4l2,uvcvideo,videobuf2_common,v4l2_mem2mem otherwise I despair of this project
Hello dear comminuty, I have spent the last few days trying to get Hardware-Accelerated Video Decoding Encoding to work on the H618. I have tried everything but it does not work. ffmpeg -input_format mjpeg -video_size 1920x1080 -i /dev/video1 -c:v cedrus264 -f rtsp rtsp://localhost:$RTSP_PORT/$MTX_PATH my goal is to output a rtsp stream from a camera. But I get this ERROR: [cedrus264 @ 0xaaaae53e5170] VE Open error. Error initializing output stream 0:0 -- Error while opening encoder for output stream #0:0 - maybe incorrect parameters such as bit_rate, rate, width or height sudo ffmpeg -f v4l2 -video_size 1280x720 -i /dev/video1 -c:v cedrus264 -pix_fmt nv12 test1.mp4 ffmpeg version git-2021-10-01-afd516b Copyright (c) 2000-2021 the FFmpeg developers built with gcc 12 (Debian 12.2.0-14) configuration: --prefix=/usr --enable-nonfree --enable-gpl --enable-version3 --enable-vdpau --enable-libx264 --enable-libmp3lame --enable-libpulse --enable-libv4l2 libavutil 57. 7.100 / 57. 7.100 libavcodec 59. 9.101 / 59. 9.101 libavformat 59. 5.100 / 59. 5.100 libavdevice 59. 0.101 / 59. 0.101 libavfilter 8. 10.100 / 8. 10.100 libswscale 6. 1.100 / 6. 1.100 libswresample 4. 0.100 / 4. 0.100 libpostproc 56. 0.100 / 56. 0.100 Input #0, video4linux2,v4l2, from '/dev/video1': Duration: N/A, start: 2315.045127, bitrate: 147456 kb/s Stream #0:0: Video: rawvideo (YUY2 / 0x32595559), yuyv422, 1280x720, 147456 kb/s, 10 fps, 10 tbr, 1000k tbn Stream mapping: Stream #0:0 -> #0:0 (rawvideo (native) -> h264 (cedrus264)) Press [q] to stop, [?] for help [cedrus264 @ 0xaaaae53e5170] VE Open error. Error initializing output stream 0:0 -- Error while opening encoder for output stream #0:0 - maybe incorrect parameters such as bit_rate, rate, width or height Conversion failed! It was a hard way for me to get compile FFmpeg with Cedrus I have to say that I am new to Linux. Therefore I hope that someone can give me a detailed instruction on how to finally get it running. lsmod | grep cedrus sunxi_cedrus 45056 0 videobuf2_dma_contig 24576 1 sunxi_cedrus v4l2_mem2mem 36864 1 sunxi_cedrus videobuf2_v4l2 24576 3 sunxi_cedrus,uvcvideo,v4l2_mem2mem videobuf2_common 49152 7 sunxi_cedrus,videobuf2_vmalloc,videobuf2_dma_contig,videobuf2_v4l2,uvcvideo,v4l2_mem2mem,videobuf2_memops videodev 204800 5 sunxi_cedrus,videobuf2_v4l2,uvcvideo,videobuf2_common,v4l2_mem2mem mc 53248 6 sunxi_cedrus,videodev,videobuf2_v4l2,uvcvideo,videobuf2_common,v4l2_mem2mem otherwise I despair of this project -
I can't seem to get apt-get update to work, this is a fresh install anyone know the fix? mango@nezha:~$ sudo apt-get update Hit:3 http://ports.ubuntu.com jammy InRelease Hit:4 http://ports.ubuntu.com jammy-security InRelease Hit:5 http://ppa.launchpadcontent.net/oibaf/graphics-drivers/ubuntu jammy InRelease Hit:6 http://ports.ubuntu.com jammy-updates InRelease Hit:7 http://ports.ubuntu.com jammy-backports InRelease Hit:1 https://paulcarroty.gitlab.io/vscodium-deb-rpm-repo/debs vscodium InRelease Hit:2 https://cli.github.com/packages stable InRelease Err:2 https://cli.github.com/packages stable InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 23F3D4EA75716059 Reading package lists... Done N: Skipping acquire of configured file 'main/binary-riscv64/Packages' as repository 'http://paulcarroty.gitlab.io/vscodium-deb-rpm-repo/debs vscodium InRelease' doesn't support architecture 'riscv64' W: An error occurred during the signature verification. The repository is not updated and the previous index files will be used. GPG error: https://cli.github.com/packages stable InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 23F3D4EA75716059 W: Failed to fetch http://cli.github.com/packages/dists/stable/InRelease The following signatures couldn't be verified because the public key is not available: NO_PUBKEY 23F3D4EA75716059 W: Some index files failed to download. They have been ignored, or old ones used instead.
-
There is a uwe5621ds WiFi module on my rk3576 development board. I burned the system image of armsom-cm5-io. After booting, calling the modprobe sprdwl_ng command will encounter the following kernel pannic [ 71.088504] Unable to handle kernel NULL pointer dereference at virtual address 00000000000001d0 [ 71.089376] Mem abort info: [ 71.089655] ESR = 0x0000000096000004 [ 71.090002] EC = 0x25: DABT (current EL), IL = 32 bits [ 71.090490] SET = 0, FnV = 0 [ 71.090784] EA = 0, S1PTW = 0 [ 71.091069] FSC = 0x04: level 0 translation fault [ 71.091509] Data abort info: [ 71.091772] ISV = 0, ISS = 0x00000004 [ 71.092147] CM = 0, WnR = 0 [ 71.092432] user pgtable: 4k pages, 48-bit VAs, pgdp=0000000102e2e000 [ 71.093018] [00000000000001d0] pgd=0000000000000000, p4d=0000000000000000 [ 71.093635] Internal error: Oops: 0000000096000004 [#1] SMP [ 71.094144] Modules linked in: sprdwl_ng(+) sprdbt_tty bnep rk805_pwrkey ufs_rockchip nvmem_rockchip_otp rockchip_cpuinfo ufshcd_pltfrm joydev input_leds ufshcd_core uio_pdrv_genirq uio zram zsmalloc binfmt_misc sch_fq_codel fuse ip_tables ipv6 pwm_blpanel_simple panfrost drm_shmem_helper gpu_sched [ 71.096551] CPU: 5 PID: 2071 Comm: modprobe Not tainted 6.1.84-vendor-rk35xx #1 [ 71.097217] Hardware name: ArmSoM CM5 IO (DT) [ 71.097614] pstate: 60000005 (nZCv daif -PAN -UAO -TCO -DIT -SSBS BTYPE=--) [ 71.098246] pc : get_loopcheck_status+0x18/0x20 [ 71.098662] lr : start_marlin+0x7c/0xc4 [ 71.099023] sp : ffff80000e8137d0 [ 71.099330] x29: ffff80000e8137d0 x28: ffff80000a31a910 x27: 0000000000000000 [ 71.099976] x26: 0000000000000000 x25: ffff80000a44e000 x24: ffff80000a670310 [ 71.100621] x23: 0000000000000000 x22: ffff80000a575fa8 x21: 0000000000000002 [ 71.101265] x20: ffff0000c4671810 x19: ffff800009466f1f x18: 0000000000000000 [ 71.101910] x17: 0000000000000000 x16: 0000000000000000 x15: 0000000000000000 [ 71.102555] x14: 0000000000000000 x13: 5d494649575f4e49 x12: 4c52414d5b206e69 [ 71.103201] x11: 0000000000000000 x10: 0000000000000000 x9 : ffff800009205260 [ 71.103846] x8 : 00000817c200001f x7 : 696c72616d5f7472 x6 : 617473203a4e4357 [ 71.104492] x5 : 0000000000000000 x4 : 0000000000000000 x3 : 0000000000000000 [ 71.105136] x2 : 0000000000000000 x1 : ffff0000c24aeac0 x0 : 0000000000000000 [ 71.105781] Call trace: [ 71.106011] get_loopcheck_status+0x18/0x20 [ 71.106397] sprdwl_probe+0x2c/0x330 [sprdwl_ng] [ 71.106881] platform_probe+0x70/0xc0 [ 71.107224] really_probe+0x1cc/0x390 [ 71.107570] __driver_probe_device+0x140/0x158 [ 71.107980] driver_probe_device+0x48/0xd0 [ 71.108356] __device_attach_driver+0x110/0x124 [ 71.108775] bus_for_each_drv+0xa4/0xd0 [ 71.109129] __device_attach+0xf0/0x174 [ 71.109482] device_initial_probe+0x1c/0x28 [ 71.109870] bus_probe_device+0x38/0x9c [ 71.110223] device_add+0x558/0x694 [ 71.110545] platform_device_add+0xe0/0x218 [ 71.110931] unisoc_wlan_init+0x54/0x1000 [sprdwl_ng] [ 71.111441] do_one_initcall+0x94/0x1e8 [ 71.111799] do_init_module+0x58/0x1dc [ 71.112152] load_module+0x1820/0x18d4 [ 71.112494] __do_sys_finit_module+0xfc/0x120 [ 71.112894] __arm64_sys_finit_module+0x24/0x30 [ 71.113315] invoke_syscall+0x8c/0x128 [ 71.113656] el0_svc_common.constprop.0+0xd8/0x124 [ 71.114097] do_el0_svc+0xa8/0xb8 [ 71.114406] el0_svc+0x2c/0x54 [ 71.114694] el0t_64_sync_handler+0xac/0x13c [ 71.115082] el0t_64_sync+0x19c/0x1a0 [ 71.115424] [ 71.115424] PC: 0xffff800008ac54c8:
-
Hi, anyone have already connected a speaker to gpio of lcpi h3 v8 (like orange pi pc). I have tried but im not sure if i2s is enabled on armbian
-
Hello, since the build for OrangePi Plus 2 is only community maintained (and there is a warning during installation that this build is not suitable for production), I though of using some generic image or a image for a similar board with standard support. Is it a good Idea? Which image should I choose? Thanks for help, Skalistan P.S. there is no tag for "OrangePi Plus 2", so I used the tag for "OrangePi Plus 2E" since it is required to add a tag.
-
 Hi, all I have a development kit board Snapdragon 8 Gen 2 SoC HDK 8550/SM8550/sm8x50. As understand it's more smartphone. Do we have support from Armbian for this board ? If so, can you provide me some info how to install it on sm8550 ? Currently, sm8550 has only fastboot and some AOSP images (u-boot, boot etc)
Hi, all I have a development kit board Snapdragon 8 Gen 2 SoC HDK 8550/SM8550/sm8x50. As understand it's more smartphone. Do we have support from Armbian for this board ? If so, can you provide me some info how to install it on sm8550 ? Currently, sm8550 has only fastboot and some AOSP images (u-boot, boot etc) -
Hi! Currently try to figure out how to run my freshly builded Armbian using QEMU arm64. According to this tutorial: https://docs.armbian.com/Developer-Guide_Build-Preparation/ I prepare clean Jammy VM. Build using this CMD: ./compile.sh BOARD=qemu-uboot-arm64 BRANCH=current RELEASE=bookworm Build process was going smoothly i pick up two files from output folder: 1) Armbian-unofficial_24.5.0-trunk_Qemu-uboot-arm64_bookworm_current_6.6.29_minimal.img.qcow2 2) Armbian-unofficial_24.5.0-trunk_Qemu-uboot-arm64_bookworm_current_6.6.29_minimal.u-boot.bin Currently boot up process stucked, i can run U-boot and mount qcow2 image using this CMD: qemu-system-aarch64 \ -machine virt -cpu cortex-a57 \ -netdev user,id=net0 -device e1000,netdev=net0 \ -serial stdio \ -bios Armbian-unofficial_24.5.0-trunk_Qemu-uboot-arm64_bookworm_current_6.6.29_minimal.u-boot.bin \ -drive if=none,file=Armbian-unofficial_24.5.0-trunk_Qemu-uboot-arm64_bookworm_current_6.6.29_minimal.img.qcow2,id=mydisk \ -device ich9-ahci,id=ahci \ -device ide-hd,drive=mydisk,bus=ahci.0 U-boot see the drive with rootfs, but during boot process i had this error: Failed to load '/boot/uInitrd' Wrong Ramdisk Image Format Ramdisk image is corrupt or invalid Boot failed (err=-14) Full boot process log: U-Boot 2023.10-armbian (Mar 14 2024 - 01:18:23 +0000) DRAM: 128 MiB Core: 51 devices, 14 uclasses, devicetree: board Flash: 64 MiB Loading Environment from Flash... *** Warning - bad CRC, using default environment In: pl011@9000000 Out: pl011@9000000 Err: pl011@9000000 Net: e1000: 52:54:00:12:34:56 eth0: e1000#0 Hit any key to stop autoboot: 0 Scanning for bootflows in all bootdevs Seq Method State Uclass Part Name Filename --- ----------- ------ -------- ---- ------------------------ ---------------- Scanning global bootmeth 'efi_mgr': Scanning bootdev 'fw-cfg@9020000.bootdev': fatal: no kernel available No working controllers found scanning bus for devices... Target spinup took 0 ms. SATA link 1 timeout. SATA link 2 timeout. SATA link 3 timeout. SATA link 4 timeout. SATA link 5 timeout. AHCI 0001.0000 32 slots 6 ports 1.5 Gbps 0x3f impl SATA mode flags: 64bit ncq only Device 0: (0:0) Vendor: ATA Prod.: QEMU HARDDISK Rev: 2.5+ Type: Hard Disk Capacity: 54564.0 MB = 53.2 GB (111747072 x 512) Scanning bootdev 'ahci_scsi.id0lun0.bootdev': 0 script ready scsi 1 ahci_scsi.id0lun0.bootdev /boot/boot.scr ** Booting bootflow 'ahci_scsi.id0lun0.bootdev.part_1' with script scanning bus for devices... Device 0: (0:0) Vendor: ATA Prod.: QEMU HARDDISK Rev: 2.5+ Type: Hard Disk Capacity: 54564.0 MB = 53.2 GB (111747072 x 512) Device 0: (0:0) Vendor: ATA Prod.: QEMU HARDDISK Rev: 2.5+ Type: Hard Disk Capacity: 54564.0 MB = 53.2 GB (111747072 x 512) <DIR> 4096 . <DIR> 4096 .. <SYM> 28 Image <SYM> 24 dtb <DIR> 4096 dtb-6.6.29-current-arm64 38518 boot.bmp 0 .next <SYM> 28 uInitrd 906 boot.cmd 6040046 System.map-6.6.29-current-arm64 978 boot.scr 49178863 uInitrd-6.6.29-current-arm64 318778 config-6.6.29-current-arm64 38134272 vmlinuz-6.6.29-current-arm64 49178799 initrd.img-6.6.29-current-arm64 KERNEL LOAD ADDRESS: kernel_addr_r : 0x40400000 INITRD LOAD ADDRESS: ramdisk_addr_r: 0x44000000 FDT LOAD ADDRESS : fdt_addr : 0x40000000 38134272 bytes read in 853 ms (42.6 MiB/s) ** Reading file would overwrite reserved memory ** Failed to load '/boot/uInitrd' Wrong Ramdisk Image Format Ramdisk image is corrupt or invalid Boot failed (err=-14) --- ----------- ------ -------- ---- ------------------------ ---------------- (1 bootflow, 1 valid) Any ideas what i'm doing wrong?
-
I have Armbian running on Banana Pi R1 without networking access. Is this board suppported at all or it is just a waste of time?