
going
-
Posts
835 -
Joined
-
Last visited
Content Type
Forums
Store
Crowdfunding
Applications
Events
Raffles
Community Map
Everything posted by going
-

thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
Yes! man apt-mark ..... PREVENT CHANGES FOR A PACKAGE hold hold is used to mark a package as held back, which will prevent the package from being automatically installed, upgraded or removed. unhold unhold is used to cancel a previously set hold on a package to allow all actions again. showhold showhold is used to print a list of packages on hold in the same way as for the other show commands. .... sudo apt-mark hold linux-image-edge-sunxi -
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
The version of the package from Armbian is the release number. Judging by the screenshot you provided, it is 23.8.1. The version of my package is 6.4.14-Armbian.23.10 that is, it will always be less than the Armbian. It probably needs to be frozen from updates. Try to check it out. Type: sudo apt upade sudo apt --list upgradable P.S.I don't use their repository. I assemble all the packages and the image myself. -
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
#!/usr/bin/bash url="https://github.com/The-going/PKG_test/raw/master/linux-edge-sunxi-6.4.14/" pkg="linux-headers-edge-sunxi_6.4.14-Armbian.23.10_armhf.deb \ linux-libc-dev_6.4.14-Armbian.23.10_armhf.deb \ linux-image-edge-sunxi_6.4.14-Armbian.23.10_armhf.deb" for p in $pkg do wget ${url}${p} done create dl.sh in target dir chmod +x dl.sh ./dl.sh sudo dpkg -i linux-image-edge-sunxi_6.4.14-Armbian.23.10_armhf.deb -
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
wget https://github.com/The-going/PKG_test/raw/master/linux-edge-sunxi-6.4.14/linux-image-edge-sunxi_6.4.14-Armbian.23.10_armhf.deb -
And what is the user waiting for? Can you formulate that?
-
The devils are hiding in the details! Some hardware vendors claim that NPUs in their processors work on some operating systems. This is the OS on their cores. Which specific chip are you interested in?
-
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
____ ____ _ __ __ _____ | __ )| _ \(_) | \/ |___ / | _ \| |_) | | | |\/| | |_ \ | |_) | __/| | | | | |___) | |____/|_| |_| |_| |_|____/ Welcome to Armbian 23.10 Bookworm with Linux 6.4.14 No end-user support: built from trunk & unsupported (bookworm) userspace! System load: 6% Up time: 3 min Memory usage: 5% of 1.96G IP: 192.168.100.101 CPU temp: 38°C Usage of /: 12% of 7.3G ========================================================================== leo@bananapim3:~$ armbianmonitor -m Two CPU clusters are available for monitoring Stop monitoring using [ctrl]-[c] Time CPU_cl0/CPU_cl1 load %cpu %sys %usr %nice %io %irq Tcpu C.St. 12:35:38 1344/1152 MHz 0.14 8% 1% 1% 0% 5% 0% 39.1 °C 0/5 12:35:43 1344/1344 MHz 0.13 0% 0% 0% 0% 0% 0% 38.7 °C 0/5 12:35:48 1344/ 768 MHz 0.12 0% 0% 0% 0% 0% 0% 39.5 °C 0/5 12:35:54 1152/1344 MHz 0.11 0% 0% 0% 0% 0% 0% 38.8 °C 0/5 12:35:59 1344/1152 MHz 0.10 0% 0% 0% 0% 0% 0% 39.4 °C 0/5 12:36:04 1344/1152 MHz 0.09 0% 0% 0% 0% 0% 0% 39.7 °C 0/5 12:36:09 768/1344 MHz 0.08 0% 0% 0% 0% 0% 0% 39.7 °C 0/5 12:36:14 1152/1344 MHz 0.08 0% 0% 0% 0% 0% 0% 39.4 °C 0/5^C This is my last kernel build for this platform. It shows the temperature correctly. You can simply download and install this kernel at: https://github.com/The-going/PKG_test/tree/master/linux-edge-sunxi-6.4.14 The *dtb*.deb package is not required. -
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
@bahtiyar57 I am aware of this regression in the latest kernel changes for sunxi. Try installing an older kernel using the armbian-config utility, for example: for current - 5.15.93-sunxi for edge - 6.1.11-sunxi If you want to build the kernel yourself, write here. I will provide you with the necessary changes for the A83T processor. -
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
Try updating the kernel -
thermal thermal_zone0: failed to read out thermal zone (-110)
going replied to bahtiyar57's topic in Allwinner sunxi
Try updating the kernel -
@Maksimarm What do you mean by that? Can you explain it in an expanded form?
-
There is not enough space on the disk that is mounted in the /boot folder. df -h ls -al /boot this will give you a hint
-
Please understand me correctly. I don't see much need to change the installation script. All other issues are general Linux administration issues and they are very well covered on the Internet.
-
Hello, Frédéric From France. There are many questions here. 1) fault tolerance. 2) recovery after exiting the working state of the root file system. (1) CD card, eMMC, are all flash drives. Technologically, they are different, but they all have a limited resource for recording. Armbian tries to reduce the number of write transactions using the overlay file system. In fact, system write transactions occur in a file located in RAM and are synchronized with the real file system on the drive at longer intervals than the system ones. (2) You want to place the entire root file system on an LVM partition whose type is linear. In this case, you have to recreate the initrd to make it work. And if your drive at the physical level starts to fail or the LVM partition is full, you get very big difficulties for data recovery. packages/bsp/common/usr/sbin/armbian-install This is a very simple script that makes a copy of the OS on your CD card from which you booted and work on an empty nand, SATA, eMMC or NVME. Your drives are eMMC and NVME. What would I do at the very beginning of the journey, when both drives are clean? Boot from the SD card and install the system on eMMC. Boot from eMMC. (for health check) Mark up the NVME drive as LVM or as BTRFS. (The BTRFS file system will provide you with all the necessary functionality.) Make logical partitions for target folders "/opt" "/var" "/srv" "/home". Boot from the SD card and copy the contents of each target folder to the corresponding logical partition while retaining all rights for files. Add the necessary mount entries in the /etc/fstab file located on the eMMC. Boot from eMMC. You are the master of the situation!
-
Hello, Frederick. Will you be able to explain a little. Why exactly this configuration. Based on the information you provided, I would do the following: 1) Make a standard "Armbian" image for the selected Operating system. 2) Record the image on the SD card. 3) Check the quality of work by booting from the SD. 4)For training, insert a USB-CD adapter with a clean SD card into the USB. 5) Using only the command line and the command (fdisk or parted) to create a partition table and create the required number of partitions. Write down the sequence of actions in a text file. This will serve as a template for writing a script. 6) Format the partitions to the selected file system using /usr/sbin/mkfs.FSTYPE 7) To manipulate the LVM partition, use the command '/usr/sbin/lvm'. Write down the sequence of actions in a mylvm text file in which the first line will contain: #!/usr/sbin/lvm Details in 'man lvm' The lvm command represents its own shell with its own set of commands, so a separate script is needed for it. You can call it at the required stage in your main BASH script. Write the main BASH script and check if it works correctly.
-
If you use this instruction, you will get branches in the repository named: megi/orange-pi-6.4 megi/orange-pi-6.5 megi/orange-pi-6.6 These branches are the result of combining 27 branches with the corresponding branch kernel.org the repository. If you extract one of these branches to the working directory and extract the difference as a series of patches with the command "git format-patch v6.5.7..HEAD -o /path/to/tmpdir" you will get more than 600 files. These patch files are already available in the build system. All megi patches in tree patch/kernel/archive/sunxi-6.5/series.megous But only those necessary for sunxi are used. The minus (-) sign in the first position indicates that the patch file is not applied and does not adapt to the current version. Copy the patches.megous folder and the series.megous file somewhere, for example: mkdir -p patch/kernel/archive/megi-6.5 cp patch/kernel/archive/sunxi-6.5/series.megous patch/kernel/archive/megi-6.5/ cp -r patch/kernel/archive/sunxi-6.5/patches.megous patch/kernel/archive/megi-6.5/ cp patch/kernel/archive/megi-6.5/series.megous patch/kernel/archive/megi-6.5/series.conf Delete all minus (-) signs in the patch/kernel/archive/megi-6.5/series.conf file. After that, you have to adapt the patches to the current kernel version yourself. Apply them to the git repository as the "git am" command in the sequence order in the series file. When the work is finished and all the patches are applied, you will be able to extract them using a mk_format_patch script. Specify an existing patch/kernel/archive/megi-6.5/patches.megous folder to extract. The changed patches will be replaced. P.S. All other questions please in a personal conversation.
-
Helios64 unstable with 23.8.1 Bullseye and 6.1.50-current-rockchip64
going replied to TDCroPower's topic in Rockchip
"OMV" is strictly tied to the Debian distribution version. This is written in the documentation. https://docs.openmediavault.org/en/6.x/releases.html#releases -
Please don't make sense of it. Take care of your health. Just build the kernel with your configuration. Developer-Guide_Build-Preparation/#executing-any-bash-statement If you need to make kernel debugging symbols or utilities, you will have to abandon the build system and build the kernel in the traditional way.
-
Helios64 unstable with 23.8.1 Bullseye and 6.1.50-current-rockchip64
going replied to TDCroPower's topic in Rockchip
I am not an expert on "OMV". Sorry. installation/on_debian - Use this documentation if "armbian-config" fails. -
Helios64 unstable with 23.8.1 Bullseye and 6.1.50-current-rockchip64
going replied to TDCroPower's topic in Rockchip
The key here is to mount the system folders /dev, /sys, /proc and enter the chroot environment using the chroot command. Mount the disk you need. If there is a separate boot partition, mount it in the /mnt/system/boot folder as well. Then these commands: root@helios64:~# mount --bind /sys /mnt/system/sys root@helios64:~# mount --bind /proc /mnt/system/proc root@helios64:~# mount --bind /dev /mnt/system/dev root@helios64:~# mount --bind /dev/pts /mnt/system/dev/pts root@helios64:~# chroot /mnt/system/ As a result, you will get a full command prompt with superuser rights and any system commands for you will be executed correctly. Update the apt cache. Install, reinstall the packages, including the headers of the new\other kernel. Enable or disable system services. Recompile your custom applications..... -
Alternatively, you can use a driver to emulate SPI on free pins (spi-gpio), if this driver is available in the kernel. This is a slow driver. But complete freedom.
-
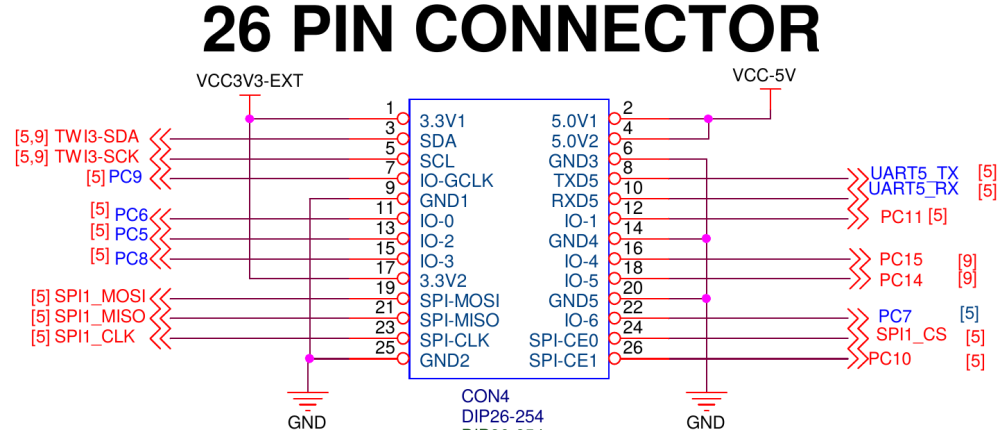
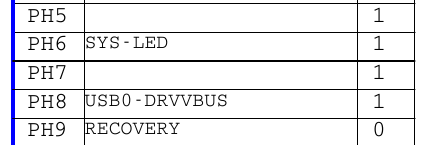
@Gunjan Gupta You are, as always, the very courtesy! Provided a link to the documentation. From which follows: 26 pins | pin name | function | -------------------------------| 3 | PH5 | spi1-cs0 ?| 19 | PH7 | spi1-mosi | 21 | PH8 | spi1-miso | 23 | PH6 | spi1-clk | 24 | PH9 | spi1-cs0 ?| 26 | PC10 | spi1-cs1 | ------------------------------- But this scheme says that the pins are divorced somewhere else. GPIO ASSIGNMENT (4) The first thing that came to my mind was to take a soldering iron in my hands and .....

-
Helios64 unstable with 23.8.1 Bullseye and 6.1.50-current-rockchip64
going replied to TDCroPower's topic in Rockchip
The fourth point should look like this: 4. $ sudo su root@helios64:~# mkdir -p /mnt/system root@helios64:~# mount /dev/mmcblk2p1 /mnt/system root@helios64:~# mount --bind /sys /mnt/system/sys root@helios64:~# mount --bind /proc /mnt/system/proc root@helios64:~# mount --bind /dev /mnt/system/dev root@helios64:~# mount --bind /dev/pts /mnt/system/dev/pts root@helios64:~# chroot /mnt/system/ .... ## install, reinstall ~# exit ## exit "chroot" ~# umount /mnt/system/dev/pts ~# umount /mnt/system/dev ~# umount /mnt/system/proc ~# umount /mnt/system/sys ~# exit ## exit "root user" If I understood correctly, booting from the system disk leads to periodic failure and reboot. But loading from the SD card does not lead to such an effect? It is important. Please confirm or refute. When loading occurs from the SD card, your raid array is not connected. The disks were just determined and they are mounted as /dev/*. The system does not access them (does not read or write). Energy consumption is at a minimum level. When booting occurs from: there may be short-term drawdowns of the supply voltage that lead to short-term inactivity of some chips (resetting the clock, failure of the hard disk controller ....). Your operating system at the time of reading or writing to the disk at the same time may be in the past or cannot read from the disk and as a result, the failure stack is printed, each time different. Fault repair: 1) Replace the watch battery on the board. 2) Open the power supply and look at the date of manufacture of the electrolytic capacitors of the output stage (they are the largest barrels in size). If the age is more than 5 years, replace them with new ones. -
orange-pi-pc-hdmi-lcd-mpi3508-touchscreen-spi-move-cs-from-pin-24-to-pin-22 You have just set up this touchscreen display for another device. This is a fact. See the schematic diagram for this new device. Perhaps SPI1 is already divorced on the board and connected to the memory chip? Use my suggestions and do it by analogy. I'm sure you can handle it.
-
Helios64 unstable with 23.8.1 Bullseye and 6.1.50-current-rockchip64
going replied to TDCroPower's topic in Rockchip
I always have advice for such a case. Download an image with an early kernel or\and later. Write it to the SD card and boot from it. If the operation of the device is stable, you will be able to mount your root partition from which the device is usually loaded and in the chroot environment you will be able to reinstall a stable kernel that you have tested.

