All Activity
- Past hour
-
 I have a question ❓️ If I found driver ethernet I can Install on miniarch I don't need to install endeavouros
I have a question ❓️ If I found driver ethernet I can Install on miniarch I don't need to install endeavouros
-
Could you help me This is my first time using it Thank you
-
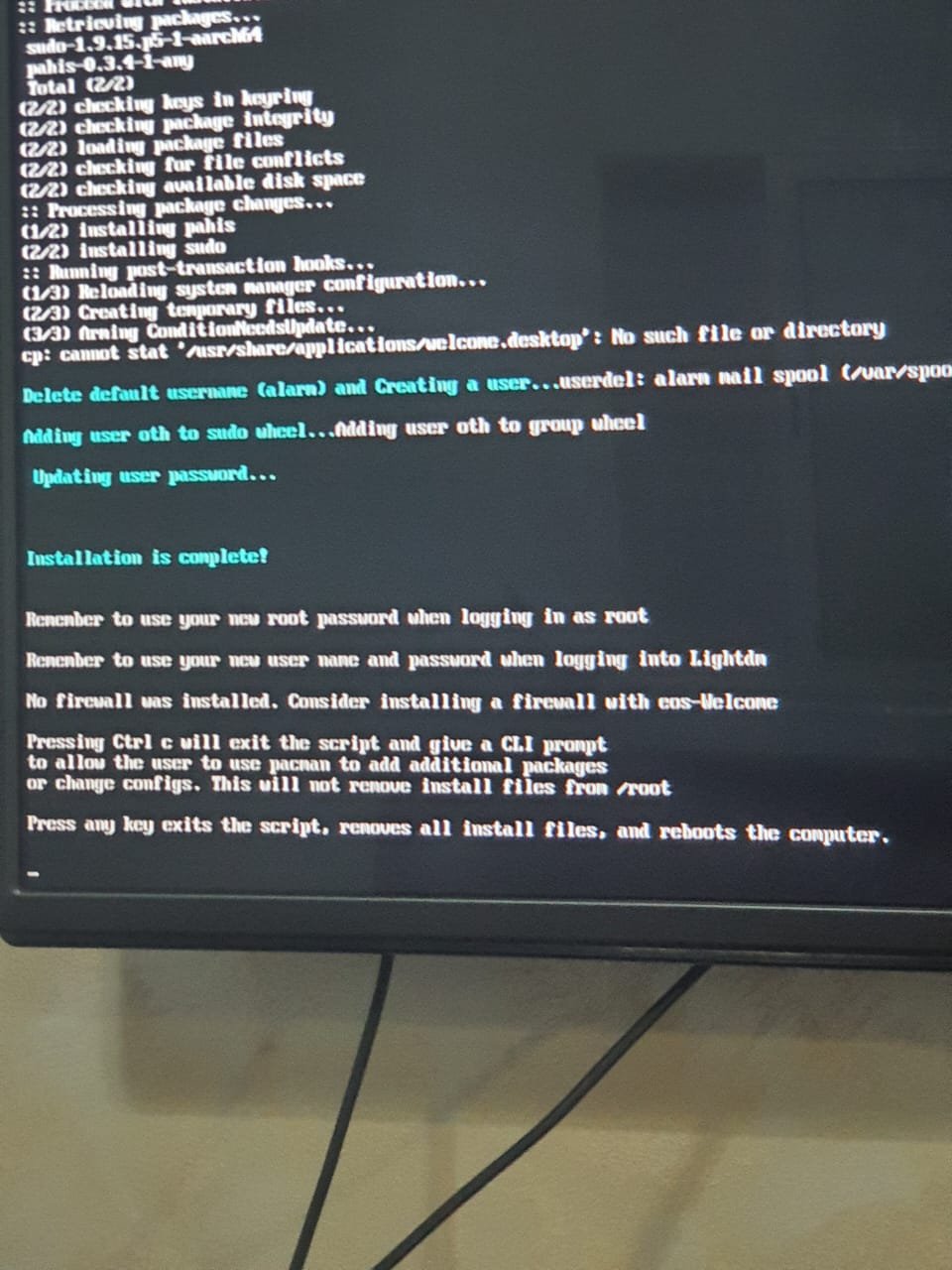
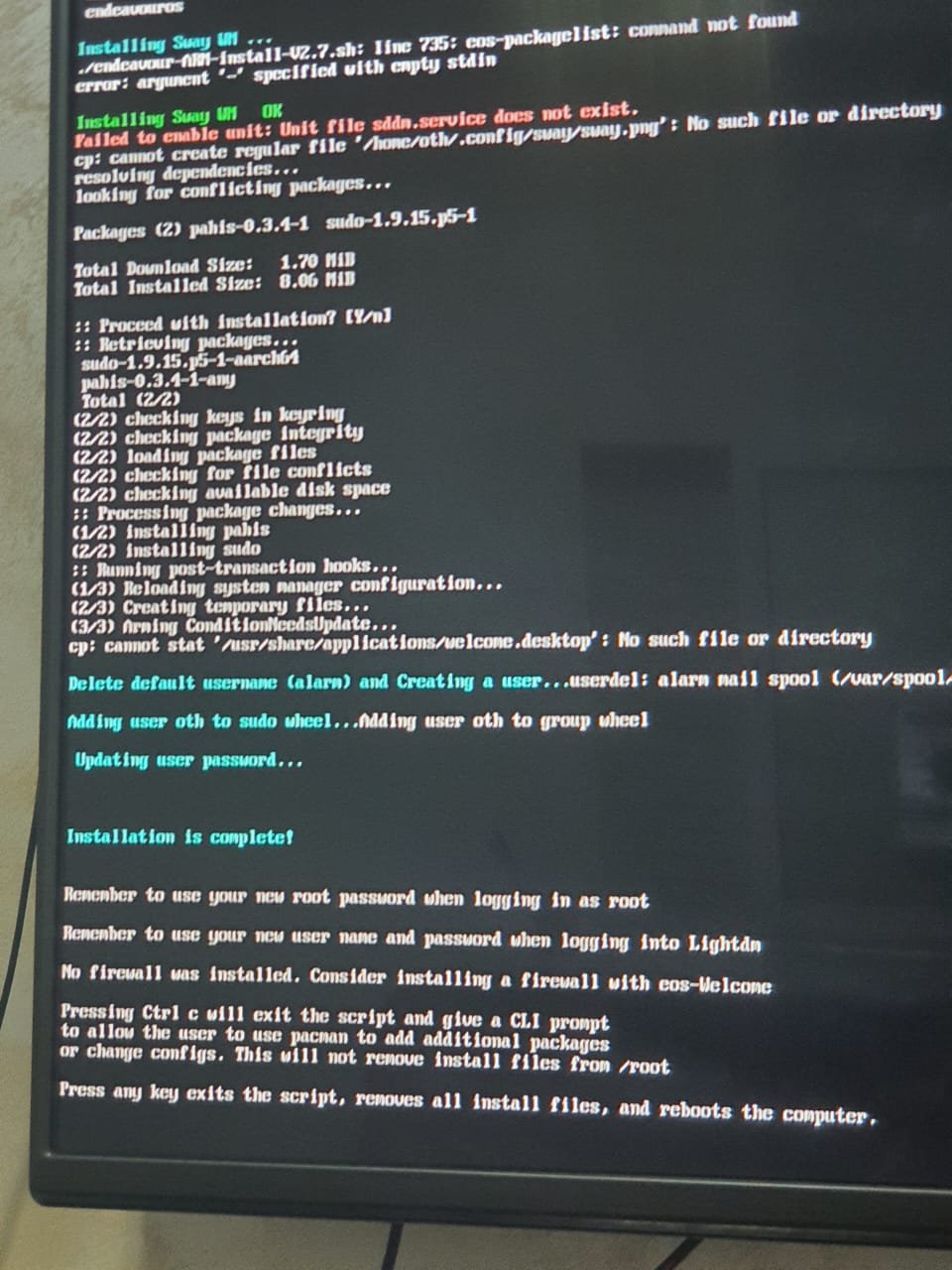
 You need install lightdm manually, welcome to Arch world, everything need medium/advanced knowledge in linux... 😅
You need install lightdm manually, welcome to Arch world, everything need medium/advanced knowledge in linux... 😅 -
Thank you friend Usb thetering done Install done After installing endeavouros How to boot to os
- Today
-

Dead board with RK3228A after first boot to armbian
jock replied to kuraimangetsu's topic in Rockchip CPU Boxes
Hello, both the versions you used share exactly the same kernel, so it is unclear to me the reason only the Jammy image boots. Actually, I don't understand why you did not use the multitool to install the armbian image and doing maintenance, but however... You can actually edit /boot/armbianEnv.txt and set verbosity=7 to have more kernel logging and perhaps something will pop up. Hint: dmesg log is basic stuff to do debugging, if you can provide it, it could be very useful. -
So it just boots directly to oowow. There is a menu item for shutdown or reboot. Reboot tells you to remove any sdcards beforehand. So I didn't. And the sdcard booted. It has installed, and reboot works. I installed to emmc and nvme. So far so good. Tried the ts1040 screen once. It might ve not been plugged correctly. Dead computer. I need to try the other direction. Copper down.
-
I guess the older bootloaders does not work at all with eMCP chip, if I remember correctly you need at least ddrbin v1.09 when you have an eMCP. It could be that your board came with an even newer ddrbin or something a bit customized. I guess you should ask the vendor for the original firmware and install it again to solve the issue if the command rate switching did not change anything.
-
Hello, thank you! I tried changing this bit in multitool-1.11 but the result is the same. I could not locate the bit in the older bootloader, the one that ran one step further. The bootloader is RK322XMiniLoaderAll_V2.47_MarcosTvBox.bin mentioned here in the last message:
-
Reverified the sdcard image. The board boots directly into oowow. I dont see an obvious way to tell it to boot from sdcard. Holding the function button on power up does nothing.
-
I am wondering how to install this. I've installed armbian on a nanopc, and edge V which is now a brick after a brief use as an armbian machine. But never successfully to a vim 3. I have a fresh out of the box vim3 that fails on boot with the current image on sdcard. The first vim4 was a doorstop on arrival. I finally have a second vim 4 that does seem to work if I push the function button 3 times it goes to oowow. But so far nothing that I've read works to boot from sdcard. "Holding the function button while power on." I havent found any instructions here about an install process other than insert the sdcard and power on, which does absolutely nothing. I have the latest cli image on sdcard. Also, I take it that vim4 only supports legacy? Any help is greatly appreciated
-

Rollback from 6.1 to 5.10 kernel - lost wifi and other modules
OttawaHacker replied to OttawaHacker's topic in Orange Pi 5
Figured it out - somehow my /lib/modules/5.10.x were not compatible with my boot image that I pulled from the latest 24.2 image. I copied the /lib/modules/5.10.160-legacy-rk35xx from working armbian image to my system and wifi is back -
I upgraded my 5.10 install to 6.1 kernel got everything working including wifi using armbian-config - change kernel but after I noticed that video acceleration was broken with vlc I decided to rollback. The initial rollback somehow failed, after some tweaking, I've been able to boot the system again and run kernel 5.1 but now I don't have my ap6275 working anymore and the video acceleration modules from 5.x seem to be gone. I have the overlay for the ap6275 but it is not loading any module. What am I missing?
-
Dear Armbians, Armbian point releases are times when our entire team works diligently to stabilize our highly complex ecosystem. We understand that, despite our best efforts, there will always be some issues that may not work perfectly. We estimate that resolving bugs and adding new features for each release takes thousands of hours to be completed. This is what the Armbian and its community contributes on top of the vanilla Linux code, which is aggregated at common points, usually referred to as mainline. The code, contributed by many individuals, is intended to be stable. However, given the complexity of the Linux kernel and its maintenance by a diverse group of people, there are no uniform standards, and code quality can vary. Nevertheless, it remains the best we have. Stay Updated with Nightly Builds We are not far from the previous point release, and if you wish to stay updated with daily changes, you are welcome to do so. To switch to nightly automated builds, follow these steps: Run sudo armbian-config Select System and then, Nightly Please note that this is not recommended for production environments, as these builds are not thoroughly tested. However, in most cases, they should work well. Before making this switch, we recommend checking our automated tests. If they are passing, you should be in a good position. Some features might still have issues, and we encourage you to engage with our developer community to help resolve them. Our team is too small and will always remain too small to address all issues alone, we can’t fix problems arising from the contributions of thousands of people. Only with your assistance we can achieve this. If you require a specific feature to work or if you want to take some of our burden away, consider sponsoring our developers, who are professionals dedicated to this work. Switch to Recent Kernel Versions If nightly builds are not sufficiently current for you, you can switch even further – to the most recent kernel versions. This option is only for those willing to take risks: Run sudo armbian-config Select System and then, Other This will provide options for kernels that you can switch to for your hardware. For example, most hardware in the previous release came with kernel v6.6, and here you will be able to roll back to the previous 6.1 or try the most recent 6.9.y / 6.10.y. Please be aware that you are entering a bleeding-edge area where stability may be compromised, but you might find that everything works well. Happy hacking! Best Regards, The Armbian team The post Armbian Leaflet #25 first appeared on Armbian. View the full article
-
The final installment of a series explaining how Collabora is helping shape the video virtualization story for Chromebooks with a focus on the future plans for cros-libva and cros-codecs. View the full article
-

Dead board with RK3228A after first boot to armbian
kuraimangetsu replied to kuraimangetsu's topic in Rockchip CPU Boxes
fixed my problem with maskmod had to hold the RST button with the usb cable connected for 10sec [counted and tried for few times] to be able to enter it again! the other problem only the desktop version works!! tried the minimal img Armbian_community_24.8.0-trunk.6_Rk322x-box_bookworm_current_6.6.31_minimal.img.xz with no vail only desktop ver works Armbian_community_24.8.0-trunk.6_Rk322x-box_jammy_current_6.6.31_xfce_desktop.img.xz -
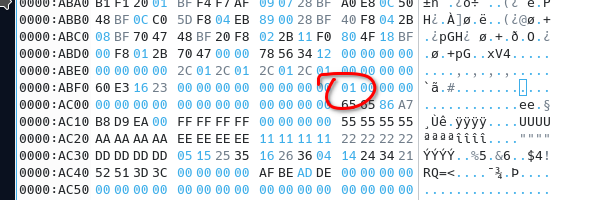
Hello, AFAIK you have two options: - broken board/DDR memories - bad command rate timing The former problem cannot be solved unless you are capable of fixing the board at industrial level, but most probably your problem is the latter. Usually most boards/ddr memories work with 2T (2 clock cycles) command rate, which is more compatible because more "relaxed". For some reasons I don't know, some DDRs want 1T Command Rate. You can edit the multitool.img file with an hex editor and change the byte at position 0xABFC. You should find it to be 0x01 (2T CR), and you should turn it to 0x00 (1T CR): then write again the multitool on sdcard and try again via maskrom The multitool is also capable to switch from 1T to 2T and viceversa when the loader is installed in the eMMC, so if you burn armbian on eMMC, don't forget to use the Command Rate multitool menu option to select the right CR option!
-
All Armbian images require the user to have an internet connection. Before the first start, your device must be connected to the router using a cable and the router must distribute IP addresses via DHCP. Almost all devices do not have a watch with a battery. Therefore, after the kernel boot stage, the OS service tries to configure the system clock by sending a request to the NTP server. If there is no response, then the system waits for it and kind of stops. The user sees a blank screen. This line says that the system turned out to be in the past. [ 6.026051] systemd[1]: System time before build time, advancing clock. At the same time, it cannot properly process the file system that is in the future. Possible solutions to the problem: 1) Purchase a watch with a battery and connect it to the 40 pin connector. Add a dtbo overlay file for this type of watch. Set the system clock to the current time. 2) Connect the device to a local network in which there is another device with a watch with a battery. Configure and run an NTP server on this device. On a device without a watch, specify the NTP address on the local network.
-
 Description Allow to use Docker credentials for oras-cli push artifacts when CI=true is set, but not in GitHub action. TODO: fix GITHUB_OUTPUT use if CI=true is set. Jira reference number AR-2357 How Has This Been Tested? [X] correct push to external container registry with CI=true Checklist: [X] My code follows the style guidelines of this project [X] I have performed a self-review of my own code [X] My changes generate no new warnings View the full article
Description Allow to use Docker credentials for oras-cli push artifacts when CI=true is set, but not in GitHub action. TODO: fix GITHUB_OUTPUT use if CI=true is set. Jira reference number AR-2357 How Has This Been Tested? [X] correct push to external container registry with CI=true Checklist: [X] My code follows the style guidelines of this project [X] I have performed a self-review of my own code [X] My changes generate no new warnings View the full article -
Description Ubuntu noble ships qbootctl with a bug which makes qbootctl service can't start: https://bugs.debian.org/cgi-bin/bugreport.cgi?bug=1057918. I fixed it in my ppa liujianfeng1994/qcom-mainline. I use a silly dd method to create rootfs. It's better to use losetup to load the built image and copy rootfs from the mounted loop device. Note: ubuntu noble also ships mkbootimg with bug: https://bugs.debian.org/cgi-bin/bugreport.cgi?bug=1050300, which will make this extension not working. So it's better not using noble as build environment. Debian's fix is still not packaged: https://salsa.debian.org/android-tools-team/android-platform-tools/-/commit/d26c3b5ac89efd92eb96ad029cd06400c1c9f015 How Has This Been Tested? Please describe the tests that you ran to verify your changes. Please also note any relevant details for your test configuration. [x] ./compile.sh BOARD=xiaomi-elish BRANCH=current BUILD_DESKTOP=yes BUILD_MINIMAL=no DEB_COMPRESS=xz DESKTOP_APPGROUPS_SELECTED= DESKTOP_ENVIRONMENT=gnome DESKTOP_ENVIRONMENT_CONFIG_NAME=config_base KERNEL_CONFIGURE=no KERNEL_GIT=shallow RELEASE=noble Checklist: Please delete options that are not relevant. [x] My code follows the style guidelines of this project [x] I have performed a self-review of my own code [ ] I have commented my code, particularly in hard-to-understand areas [x] My changes generate no new warnings [ ] Any dependent changes have been merged and published in downstream modules View the full article
-
Description The general improvements for RK3588 on 6.9 and 6.10 weren't as many as we've hoped, but still this is what was mainlined: USB3 DRD support, including PHY usbdp HDMI PHY GPU We already had most of those features patched in via patches, but this gives us the chance to finally be able to remove those and stay closer to mainline. -> PR summary: (+5,895 - 28,098) ~= 22,000 lines less 👍 (meaning less hassles in the future, less maintenance needed) In addition to that, I have also updated our patch to support RK3588 thermal sensors and management, enabling and improving the use of cooling fans. This patch also includes updates for CpuFreq and OPP. We had an old patch that patched in the HDMI Controller driver, but this patch does not build on 6.10. Fortunately, I was able to include a new, improved version for this driver, which is as recent as 1st of June. Since out "general-add-overlay-compilation-support.patch" became obsolete in Linux 6.9 (see AR-2352) , @paolosabatino developed an improved way on adding overlays as first seen in https://github.com/armbian/build/pull/6690. I have adapted this patch for 6.10, which also paves the way for other kernel bumps to 6.10 in the future. In addition to that, there are some fixes included for Orange Pi 5 and Khadas Edge 2 patches, which were failing on 6.10. Please see the commit messages for details. How Has This Been Tested? [x] Compile success: ./compile.sh BOARD=nanopc-cm3588-nas BRANCH=edge RELEASE=trixie EXPERT=yes KERNEL_CONFIGURE=no BUILD_MINIMAL=no BUILD_DESKTOP=no [ ] HDMI is untested [ ] More general testing is needed Checklist: [x] My code follows the style guidelines of this project [x] I have performed a self-review of my own code [x] I have commented my code, particularly in hard-to-understand areas [x] My changes generate no new warnings View the full article
-

Efforts to develop firmware for H96 MAX V56 RK3566 8G/64G
Hqnicolas replied to Hqnicolas's topic in Rockchip CPU Boxes
Can Somebody help? Wifi works, but, bluetooth dont... This is the Kernel 6.1 image V11 -
a Few days ago I started noticing strange behavior with calls failing and pods with valid imag tags not working and finally figured out what seems like armbian stopped trusting any certificates. When I apt update I get errors (certificate something something) When I curl google.com it says invalid certificate and have to use --insecure for it to work. I've run update ca-certifactes -f to try and force it to trust them again but no real idea of what is wrong here.
-
Dead board with RK3228A after first boot to armbian
kuraimangetsu replied to kuraimangetsu's topic in Rockchip CPU Boxes
that what i did first, to install the img! but now, it wont go on maskmod again -
Dead board with RK3228A after first boot to armbian
Hqnicolas replied to kuraimangetsu's topic in Rockchip CPU Boxes
If the board is not detected on your PC, try pressing the reset button behind the audio jack connector, and keeping it pressed for two seconds while giving power to the board and then try again with the male-to-male cable. -
 I would use this to replace my current NanoPC-T6 home server, as this lies freely within an ATX case in my 19inch rack ... the Rock5 ITX would definitely fit better into the case, and I could also use the plugs on the ATX header much better. (The NanoPC-T6 will then be used for some other projects ... definitely some AI related stuff :D)
I would use this to replace my current NanoPC-T6 home server, as this lies freely within an ATX case in my 19inch rack ... the Rock5 ITX would definitely fit better into the case, and I could also use the plugs on the ATX header much better. (The NanoPC-T6 will then be used for some other projects ... definitely some AI related stuff :D)