Active threads
Showing topics posted in for the last 365 days.
- Past hour
-
 I see from https://github.com/nextcloud/nextcloudpi/releases that 'pi' is sort of a synonymy for 'ARM SBC' or pre-installed images. 'pi' is great but a problem as it is not generic arm64 so every SBC flavor needs a 1GByte zip image just for a different kernel and bootloader. Same as long time ago I used a 'pi' script to get Node-RED installed in an x86 Debian Bullseye Virtual Machine (so just 'Debian' actually), I would focus on generic solutions. Armbian is doing very well w.r.t. alignment and portability, so the SoC or SBC does not really matter, as long as it is compliant with Debian ARM64. For Node-RED on Opensuse-Tumbleweed ARM64 I needed to hack the script a bit to fake a compliance check, but with that, it also worked. It saved an enormous amount of effort re-installing OS etc. So bottom line is, maker sure you don't lock yourself into a certain SBC or SoC, but make sure it is standard generic ARM64 (or standard x86-64, which is already the case for years) A way to keep your current installation is to 'virtualize' it: What runs on the Odroid or RaspberryPi or other SBC from SD-card or eMMC or NVME or SSD can be made EFI bootable and then it will run as virtual machine on the same SBC or other new/faster SBC of course as well. I have done this for RPI3B functions -> RPI4B in the past (also 32-bit VM in 64-bit host, Pi-Hole for example) and this year again to replace RPi4B-8GB with ROCK5B-16GB. It is beyond the scope of this topic, but start with installing 'virt-manager' and try to boot and Armbian-UEFI image/instance. Or see: https://github.com/nextcloud/vm I haven't used 'cloud' since owncloud, but right now, if I would certainly start with a VM. Same for e.g. HAOS, runs fine in a VM on ROCK5B. You do not need proxmox, all is build-in in Linux already.
I see from https://github.com/nextcloud/nextcloudpi/releases that 'pi' is sort of a synonymy for 'ARM SBC' or pre-installed images. 'pi' is great but a problem as it is not generic arm64 so every SBC flavor needs a 1GByte zip image just for a different kernel and bootloader. Same as long time ago I used a 'pi' script to get Node-RED installed in an x86 Debian Bullseye Virtual Machine (so just 'Debian' actually), I would focus on generic solutions. Armbian is doing very well w.r.t. alignment and portability, so the SoC or SBC does not really matter, as long as it is compliant with Debian ARM64. For Node-RED on Opensuse-Tumbleweed ARM64 I needed to hack the script a bit to fake a compliance check, but with that, it also worked. It saved an enormous amount of effort re-installing OS etc. So bottom line is, maker sure you don't lock yourself into a certain SBC or SoC, but make sure it is standard generic ARM64 (or standard x86-64, which is already the case for years) A way to keep your current installation is to 'virtualize' it: What runs on the Odroid or RaspberryPi or other SBC from SD-card or eMMC or NVME or SSD can be made EFI bootable and then it will run as virtual machine on the same SBC or other new/faster SBC of course as well. I have done this for RPI3B functions -> RPI4B in the past (also 32-bit VM in 64-bit host, Pi-Hole for example) and this year again to replace RPi4B-8GB with ROCK5B-16GB. It is beyond the scope of this topic, but start with installing 'virt-manager' and try to boot and Armbian-UEFI image/instance. Or see: https://github.com/nextcloud/vm I haven't used 'cloud' since owncloud, but right now, if I would certainly start with a VM. Same for e.g. HAOS, runs fine in a VM on ROCK5B. You do not need proxmox, all is build-in in Linux already. -
$ apt list -a --installed linux-u-boot-rock-5b* Listing... Done linux-u-boot-rock-5b-current/now 25.8.2 arm64 [installed,local] linux-u-boot-rock-5b-current/noble 25.8.1 arm64 linux-u-boot-rock-5b-current/noble 25.5.1 arm64 linux-u-boot-rock-5b-current/noble 25.2.3 arm64 linux-u-boot-rock-5b-current/noble 25.2.2 arm64 linux-u-boot-rock-5b-current/noble 24.11.3 arm64 linux-u-boot-rock-5b-current/noble 24.11.1 arm64 linux-u-boot-rock-5b-current/noble 24.8.2 arm64 $ dpkg -L linux-u-boot-rock-5b-current /. /usr /usr/lib /usr/lib/linux-u-boot-current-rock-5b /usr/lib/linux-u-boot-current-rock-5b/idbloader.img /usr/lib/linux-u-boot-current-rock-5b/rkspi_loader.img /usr/lib/linux-u-boot-current-rock-5b/u-boot-config-target-1 /usr/lib/linux-u-boot-current-rock-5b/u-boot-defconfig-target-1 /usr/lib/linux-u-boot-current-rock-5b/u-boot-metadata-target-1.sh /usr/lib/linux-u-boot-current-rock-5b/u-boot-metadata.sh /usr/lib/linux-u-boot-current-rock-5b/u-boot.itb /usr/lib/u-boot /usr/lib/u-boot/LICENSE /usr/lib/u-boot/platform_install.sh /usr/lib/u-boot/rock-5b-rk3588_defconfig /usr/share /usr/share/doc /usr/share/doc/linux-u-boot-rock-5b-current /usr/share/doc/linux-u-boot-rock-5b-current/changelog.gz $ cat /usr/lib/u-boot/platform_install.sh # Armbian u-boot install script for linux-u-boot-rock-5b-current 2017.09-Sa317-Pedb0-H5208-Vc393-Bb703-R448a # This file provides functions for deploying u-boot to a block device. DIR=/usr/lib/linux-u-boot-current-rock-5b write_uboot_platform () { local logging_prelude=""; [[ $(type -t run_host_command_logged) == function ]] && logging_prelude="run_host_command_logged"; if [ -f $1/u-boot-rockchip.bin ]; then ${logging_prelude} dd if=$1/u-boot-rockchip.bin of=$2 bs=32k seek=1 conv=notrunc status=none; else if [ -f $1/rksd_loader.img ]; then ${logging_prelude} dd if=$1/rksd_loader.img of=$2 seek=64 conv=notrunc status=none; else if [[ -f $1/u-boot.itb ]]; then ${logging_prelude} dd if=$1/idbloader.img of=$2 seek=64 conv=notrunc status=none; ${logging_prelude} dd if=$1/u-boot.itb of=$2 seek=16384 conv=notrunc status=none; else if [[ -f $1/uboot.img ]]; then ${logging_prelude} dd if=$1/idbloader.bin of=$2 seek=64 conv=notrunc status=none; ${logging_prelude} dd if=$1/uboot.img of=$2 seek=16384 conv=notrunc status=none; ${logging_prelude} dd if=$1/trust.bin of=$2 seek=24576 conv=notrunc status=none; else echo "Unsupported u-boot processing configuration!"; exit 1; fi; fi; fi; fi } write_uboot_platform_mtd () { FILES=$(find "$1" -maxdepth 1 -type f -name "rkspi_loader*.img"); if [ -z "$FILES" ]; then echo "No SPI image found."; exit 1; fi; MENU_ITEMS=(); i=1; while IFS= read -r file; do filename=$(basename "$file"); MENU_ITEMS+=("$i" "$filename" ""); ((i++)); done <<< "$FILES"; if [[ $i -eq 2 ]]; then dd if=$1/${MENU_ITEMS[1]} of=$2 conv=notrunc status=none > /dev/null 2>&1; return; fi; [[ -f /etc/armbian-release ]] && source /etc/armbian-release; backtitle="Armbian for $BOARD_NAME install script, https://www.armbian.com"; CHOICE=$(dialog --no-collapse --title "armbian-install" --backtitle "$backtitle" --radiolist "Choose SPI image:" 0 56 4 "${MENU_ITEMS[@]}" 3>&1 1 >&2 2>&3); if [ $? -eq 0 ]; then dd if=$1/${MENU_ITEMS[($CHOICE*3)-2]} of=$2 conv=notrunc status=none > /dev/null 2>&1; else echo "No SPI image chosen."; exit 1; fi } setup_write_uboot_platform () { if grep -q "ubootpart" /proc/cmdline; then local tmp part dev; tmp=$(cat /proc/cmdline); tmp="${tmp##*ubootpart=}"; tmp="${tmp%% *}"; [[ -n $tmp ]] && part=$(findfs PARTUUID=$tmp 2> /dev/null); [[ -n $part ]] && dev=$(lsblk -n -o PKNAME $part 2> /dev/null); [[ -n $dev ]] && DEVICE="/dev/$dev"; fi } $ cat /dev/mtdblock0 > /tmp/spidump $ strings /tmp/spidump | grep -i U.*Boot nothing $ du -h /tmp/spidump 16M /tmp/spidump It seems something installed and configured but for -current not for -edge I thought that -current version more stable. Am I wrong and I need to install -edge ?
- Today
-
Building a new image did not solve the issue. no output on lsusb when plugging in anything. no output related to usb on dmesg. I personally think it is related to missing dts information. I did find this: https://github.com/armbian/linux-rockchip/blob/rk-6.1-rkr5.1/arch/arm/configs/rk3506-usb-otg.config And this: https://github.com/armbian/linux-rockchip/blob/rk-6.1-rkr5.1/arch/arm/configs/rk3506-usb-host.config Which I hope will enable me to use the usb. Specifcially: CONFIG_USB_COMMON=y & CONFIG_USB_GADGET=y & CONFIG_USB=y Will see what I can do after work today since it is friday Also for my own information, Here is the dtsi for the rk3506: https://github.com/armbian/linux-rockchip/blob/rk-6.1-rkr5.1/arch/arm/boot/dts/rk3506.dtsi And also this one: https://github.com/armbian/linux-rockchip/blob/rk-6.1-rkr5.1/arch/arm/boot/dts/rk3506b-luckfox-lyra-zero-w-sd.dts
-

Support for TC358743 CSI to HDMI on Radxa Zero 3W
opi-5-plus-user posted a topic in Radxa Zero 3W/3E
I have tried to get the CSI port working on my Radxa Zero 3W with the GEEKOM X1301 HAT, and now I can get the chip to show up in /dev, however there seems to be an issue when I try to access it, as I keep getting ioctl errors. I started by copying over the .dtbo files from the regular radxa official image, and putting them into the overlay-user folder in /boot. Then I enabled the radxa-zero3-tc358743.dtbo overlay, which gets the devices to show up. I am following this guide from GEEKOM https://wiki.geekworm.com/X1300_Software, however, I keep getting ioctl errors when trying to set the EDID file on the Radxa Zero. On the Raspberry Pi, this was not an issue. Here is the output of my media-ctl: media-ctl -d /dev/media0 -p Media controller API version 6.1.115 Media device information ------------------------ driver rkisp-vir0 model rkisp0 serial bus info platform:rkisp-vir0 hw revision 0x0 driver version 6.1.115 Device topology - entity 1: rkisp-isp-subdev (4 pads, 8 links, 0 routes) type V4L2 subdev subtype Unknown flags 0 device node name /dev/v4l-subdev0 pad0: SINK,MUST_CONNECT [stream:0 fmt:UYVY8_2X8/640x480 field:none colorspace:srgb crop.bounds:(0,0)/640x480 crop:(0,0)/640x480] <- "rkisp-csi-subdev":1 [ENABLED] <- "rkisp_rawrd0_m":0 [] <- "rkisp_rawrd2_s":0 [] pad1: SINK <- "rkisp-input-params":0 [ENABLED] pad2: SOURCE [stream:0 fmt:YUYV8_2X8/640x480 field:none colorspace:smpte170m quantization:full-range crop.bounds:(0,0)/640x480 crop:(0,0)/640x480] -> "rkisp_mainpath":0 [ENABLED] -> "rkisp_selfpath":0 [ENABLED] -> "rkisp_iqtool":0 [ENABLED] pad3: SOURCE -> "rkisp-statistics":0 [ENABLED] - entity 6: rkisp-csi-subdev (6 pads, 5 links, 0 routes) type V4L2 subdev subtype Unknown flags 0 device node name /dev/v4l-subdev1 pad0: SINK,MUST_CONNECT [stream:0 fmt:UYVY8_2X8/640x480 field:none colorspace:srgb] <- "rockchip-csi2-dphy0":1 [ENABLED] pad1: SOURCE,MUST_CONNECT [stream:0 fmt:UYVY8_2X8/640x480 field:none colorspace:srgb] -> "rkisp-isp-subdev":0 [ENABLED] pad2: SOURCE -> "rkisp_rawwr0":0 [ENABLED] pad3: SOURCE pad4: SOURCE -> "rkisp_rawwr2":0 [ENABLED] pad5: SOURCE -> "rkisp_rawwr3":0 [ENABLED] - entity 13: rkisp_mainpath (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video0 pad0: SINK <- "rkisp-isp-subdev":2 [ENABLED] - entity 19: rkisp_selfpath (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video1 pad0: SINK <- "rkisp-isp-subdev":2 [ENABLED] - entity 25: rkisp_rawwr0 (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video2 pad0: SINK <- "rkisp-csi-subdev":2 [ENABLED] - entity 31: rkisp_rawwr2 (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video3 pad0: SINK <- "rkisp-csi-subdev":4 [ENABLED] - entity 37: rkisp_rawwr3 (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video4 pad0: SINK <- "rkisp-csi-subdev":5 [ENABLED] - entity 43: rkisp_iqtool (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video5 pad0: SINK <- "rkisp-isp-subdev":2 [ENABLED] - entity 49: rkisp_rawrd0_m (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video6 pad0: SOURCE -> "rkisp-isp-subdev":0 [] - entity 55: rkisp_rawrd2_s (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video7 pad0: SOURCE -> "rkisp-isp-subdev":0 [] - entity 61: rkisp-statistics (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video8 pad0: SINK <- "rkisp-isp-subdev":3 [ENABLED] - entity 67: rkisp-input-params (1 pad, 1 link) type Node subtype V4L flags 0 device node name /dev/video9 pad0: SOURCE -> "rkisp-isp-subdev":1 [ENABLED] - entity 73: rockchip-csi2-dphy0 (2 pads, 2 links, 0 routes) type V4L2 subdev subtype Unknown flags 0 device node name /dev/v4l-subdev2 pad0: SINK,MUST_CONNECT [stream:0 fmt:UYVY8_2X8/640x480@10000/600000 field:none colorspace:srgb] <- "m00_b_tc35874x 2-000f":0 [ENABLED] pad1: SOURCE,MUST_CONNECT -> "rkisp-csi-subdev":0 [ENABLED] - entity 76: m00_b_tc35874x 2-000f (1 pad, 1 link, 0 routes) type V4L2 subdev subtype Sensor flags 0 device node name /dev/v4l-subdev3 pad0: SOURCE [stream:0 fmt:UYVY8_2X8/640x480@10000/600000 field:none colorspace:srgb] [dv.caps:BT.656/1120 min:1x1@0 max:10000x10000@310000000 stds:CEA-861,DMT,CVT,GTF caps:interlaced,progressive,reduced-blanking,custom] [dv.query:no-link] [dv.current:BT.656/1120 640x480p59 (800x525) stds:CEA-861,DMT flags:has-cea861-vic] -> "rockchip-csi2-dphy0":0 [ENABLED] The GEEKOM does seem to require some GPIOs, as shown in the second picture from this link https://geekworm.com/products/x1301, however, these all seem to be for audio functionality, which I have disabled. I currently only have the GEEKOM X1301 connected through the CSI Port to the Radxa Zero, as it physically cannot have the GPIOs and the CSI port connected at the same time. Here is the output of my /dev folder autofs crypto fuse hugepages input loop3 mem port rga stdout tty13 tty20 tty28 tty35 tty42 tty5 tty57 tty7 urandom vcs2 vcsa3 vcsu4 video0 video8 block cuse gpiochip0 hwrng iomux loop4 mmcblk1 ppp rk_cec sw_sync tty14 tty21 tty29 tty36 tty43 tty50 tty58 tty8 v4l vcs3 vcsa4 vcsu5 video1 video9 btrfs-control disk gpiochip1 i2c-0 kmsg loop5 mmcblk1p1 psaux rtc tty tty15 tty22 tty3 tty37 tty44 tty51 tty59 tty9 v4l-subdev0 vcs4 vcsa5 vcsu6 video2 watchdog bus dma_heap gpiochip2 i2c-2 kvm loop6 mmcblk1p2 ptmx rtc0 tty0 tty16 tty23 tty30 tty38 tty45 tty52 tty6 ttyFIQ0 v4l-subdev1 vcs5 vcsa6 vfio video3 watchdog0 cec0 dri gpiochip3 i2c-3 log loop7 mpp_service pts shm tty1 tty17 tty24 tty31 tty39 tty46 tty53 tty60 ttyS1 v4l-subdev2 vcs6 vcsu vga_arbiter video4 zero char fb0 gpiochip4 i2c-6 loop0 loop-control mqueue ram0 snd tty10 tty18 tty25 tty32 tty4 tty47 tty54 tty61 ubi_ctrl v4l-subdev3 vcsa vcsu1 vhci video5 zram0 console fd gpiochip5 iio:device0 loop1 mapper net random stderr tty11 tty19 tty26 tty33 tty40 tty48 tty55 tty62 uhid vcs vcsa1 vcsu2 vhost-net video6 zram1 cpu_dma_latency full hdmi_hdcp1x initctl loop2 media0 null rfkill stdin tty12 tty2 tty27 tty34 tty41 tty49 tty56 tty63 uinput vcs1 vcsa2 vcsu3 vhost-vsock video7 zram2 This is the error that I get when I run the command to set the EDID file. v4l2-ctl -d /dev/v4l-subdev3 --set-edid=file=1080P60EDID.txt VIDIOC_SUBDEV_S_CLIENT_CAP: failed: Inappropriate ioctl for device Is there any way that I can resolve this issue? The HAT's power LED doesn't light up for some reason, and the device also isn't detected when I plug in any other devices HDMI out into the HDMI IN on the HAT. - Yesterday
-
LC_ALL=C apt update Hit:1 http://security.debian.org bookworm-security InRelease Hit:2 http://deb.debian.org/debian bookworm InRelease Hit:3 http://deb.debian.org/debian bookworm-updates InRelease Hit:4 https://download.docker.com/linux/debian bookworm InRelease Hit:5 http://deb.debian.org/debian bookworm-backports InRelease Hit:6 https://github.armbian.com/configng stable InRelease Hit:7 https://dtcooper.github.io/raspotify raspotify InRelease Hit:8 http://fi.mirror.armbian.de/beta bookworm InRelease Reading package lists... Done Building dependency tree... Done Reading state information... Done 1 package can be upgraded. Run 'apt list --upgradable' to see it. root@orangepi3-lts:~# apt list --upgradable Listing... Gotowe armbian-bsp-cli-orangepi3-lts-current/bookworm 25.11.0-trunk.439 arm64 [upgradable from: 25.8.0-trunk.49] N: There is 1 additional version. Please use the '-a' switch to see it
-
 Submitted the PR: https://github.com/armbian/build/pull/8882
Submitted the PR: https://github.com/armbian/build/pull/8882 -

Cannot run ARMbian on my tv box (TX10 PRO)
Nick A replied to erebus041's topic in Allwinner CPU Boxes
@Farhan Ishraq Have you tried the images in the link @Sadiq Ahmed posted? Download BalenaEtcher software. Write one of the bigtreetech cb1 images onto a SDcard. Put it in your box and boot. -
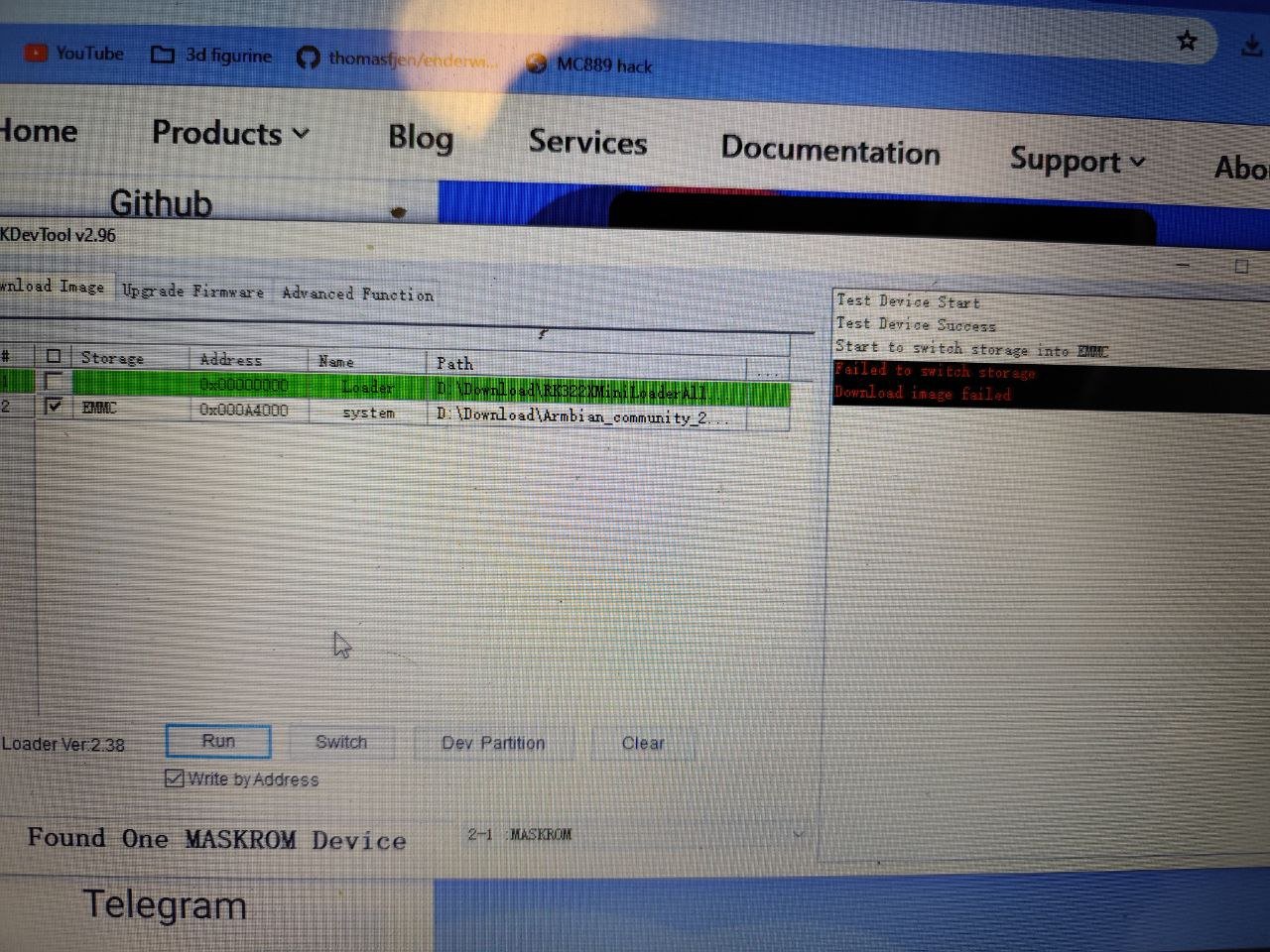
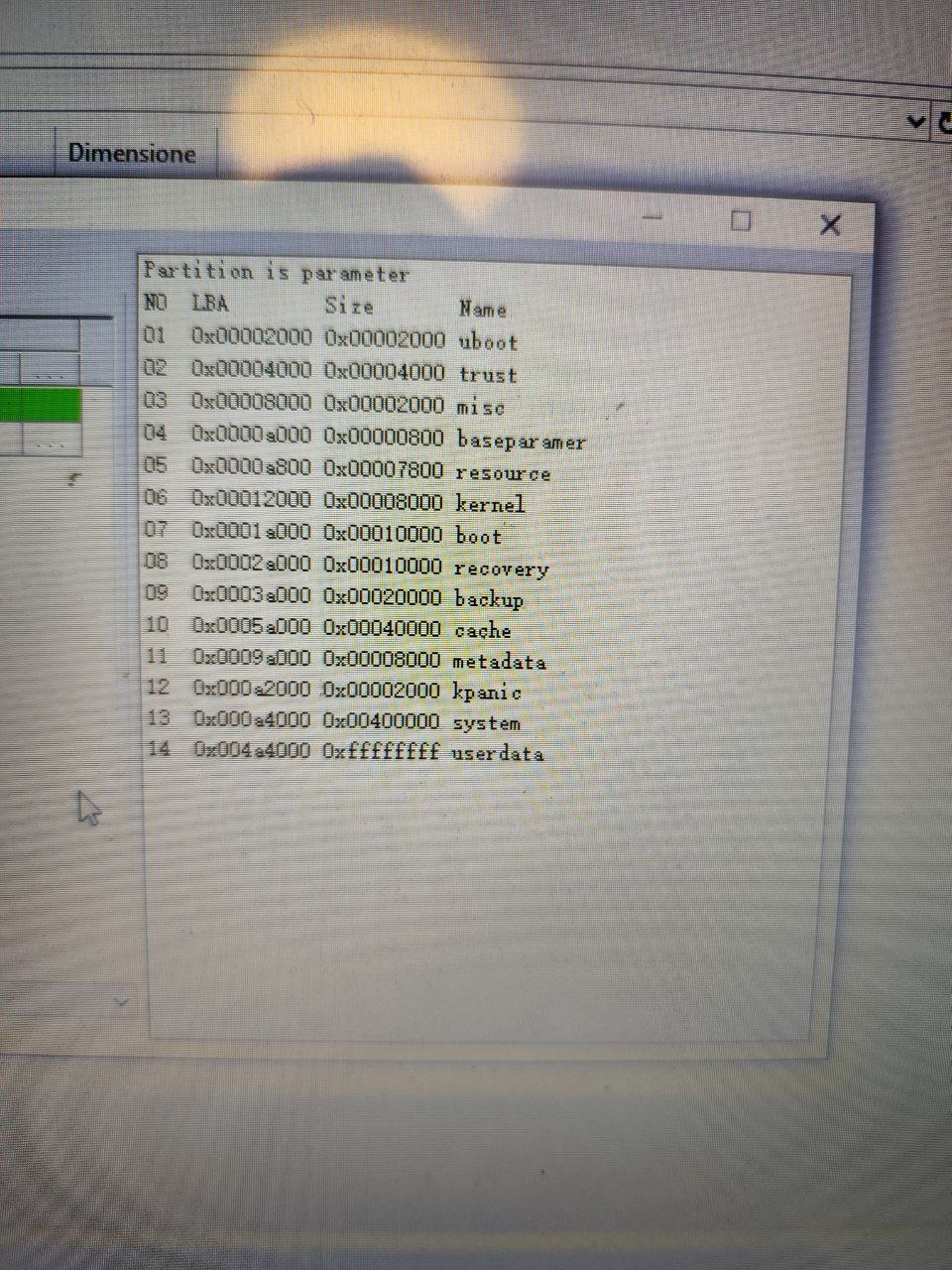
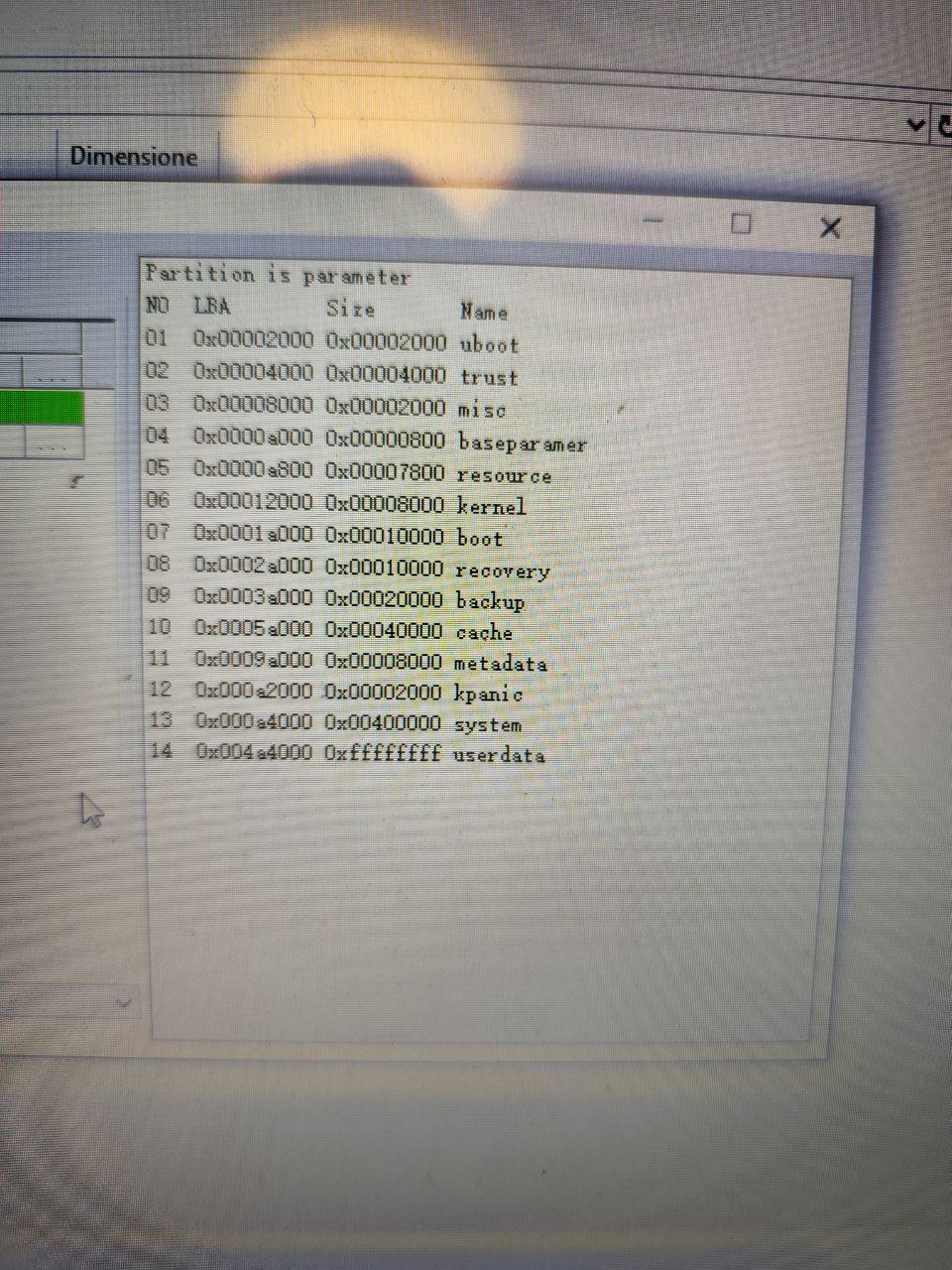
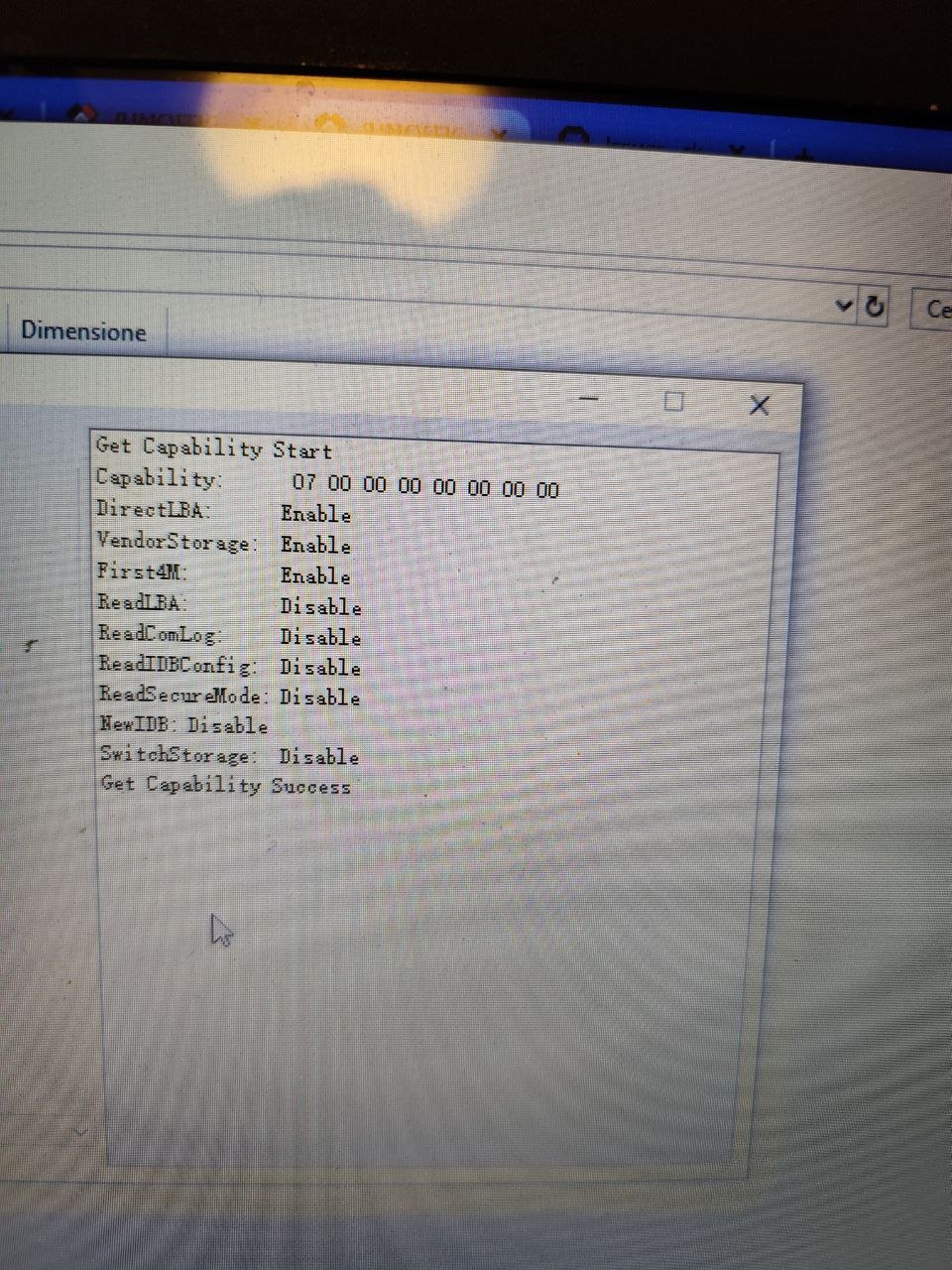
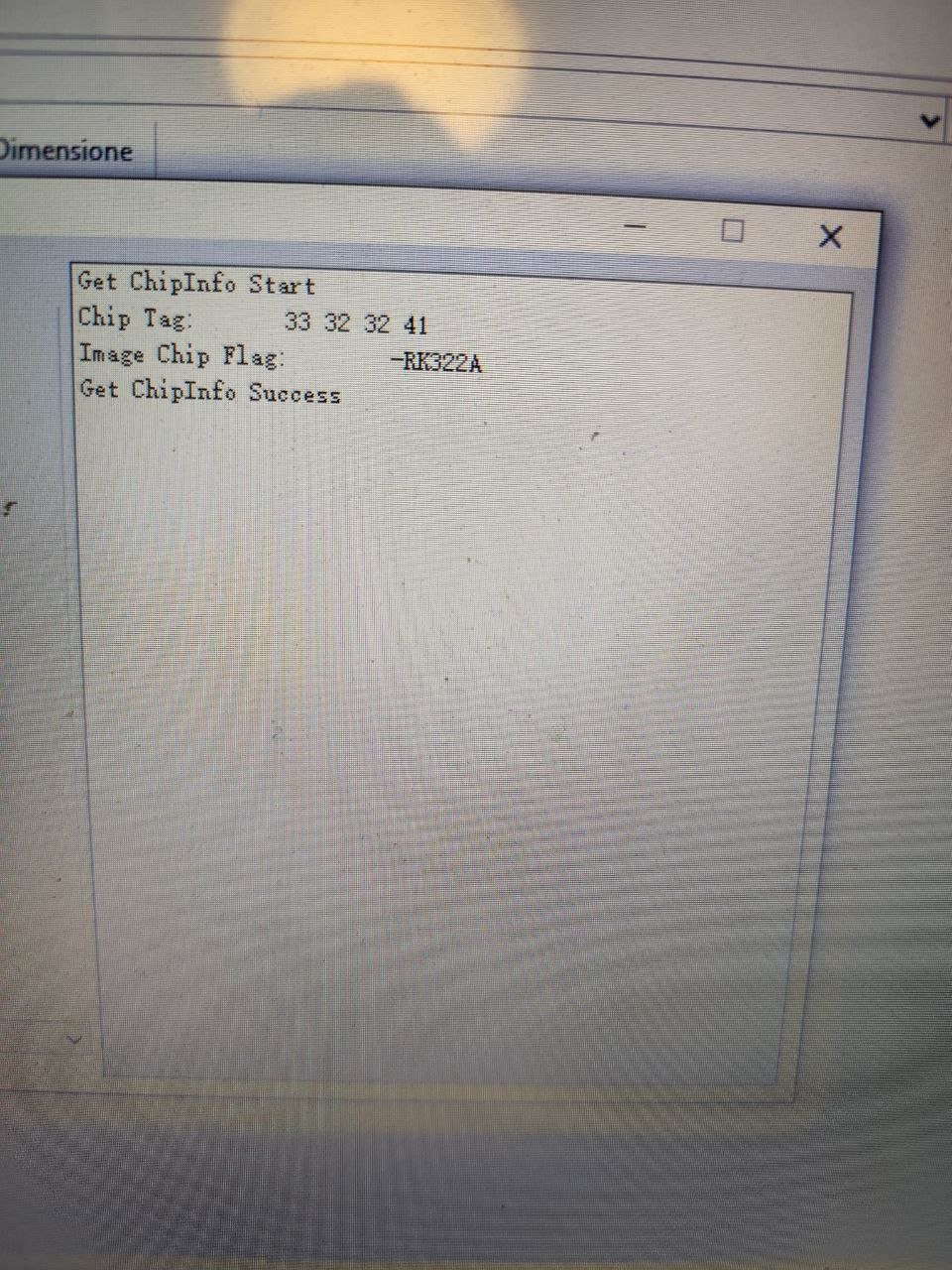
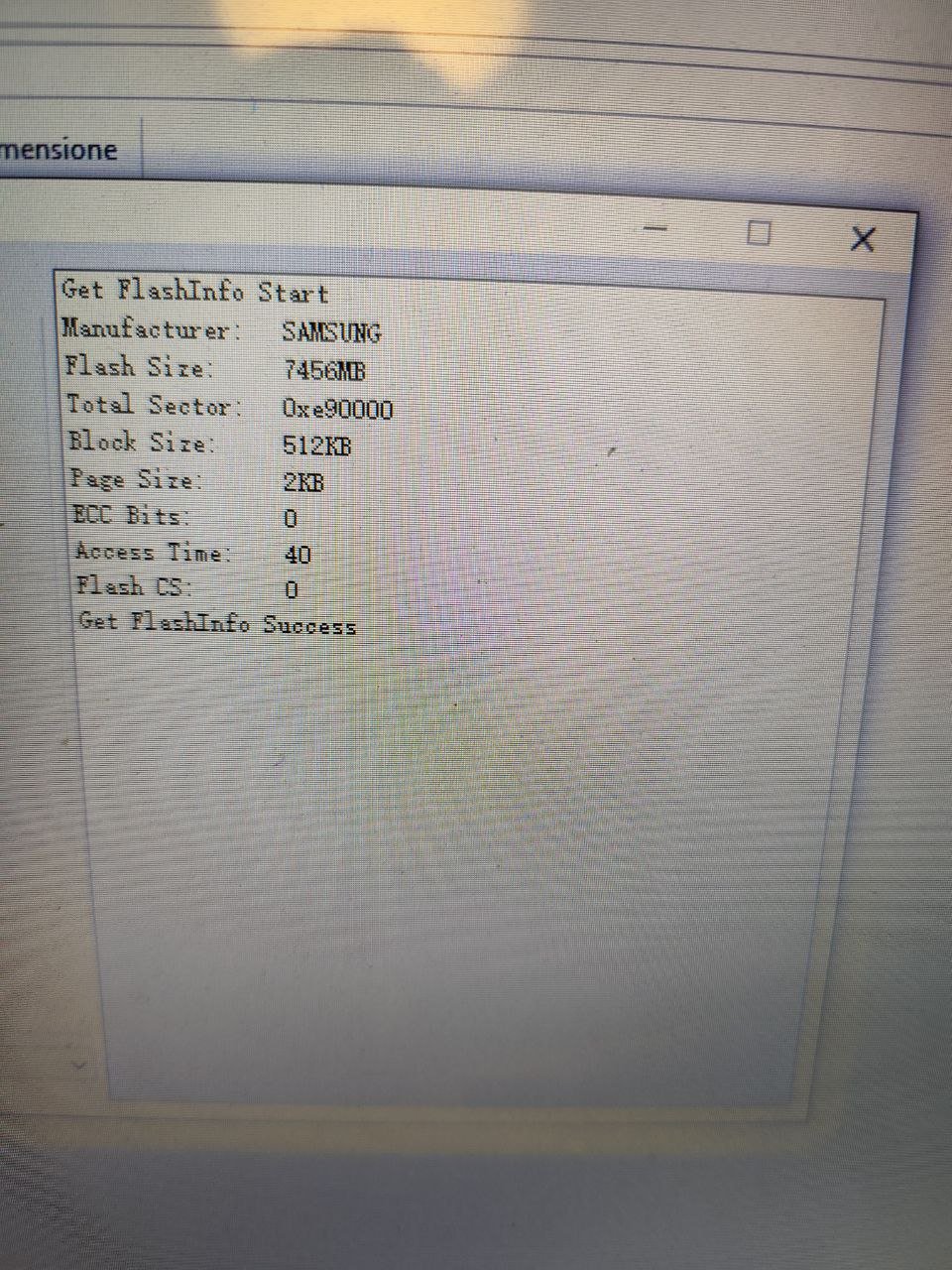
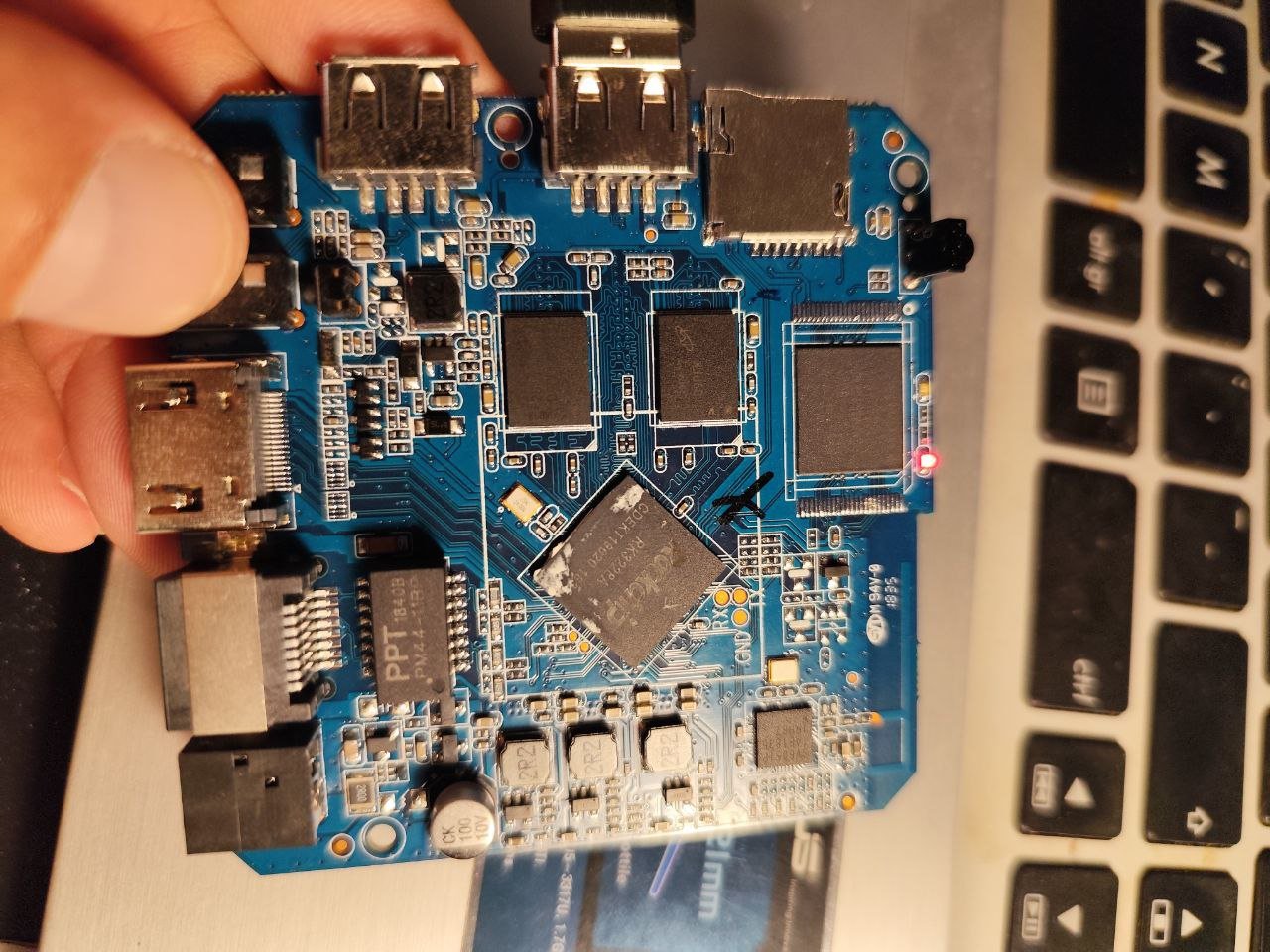
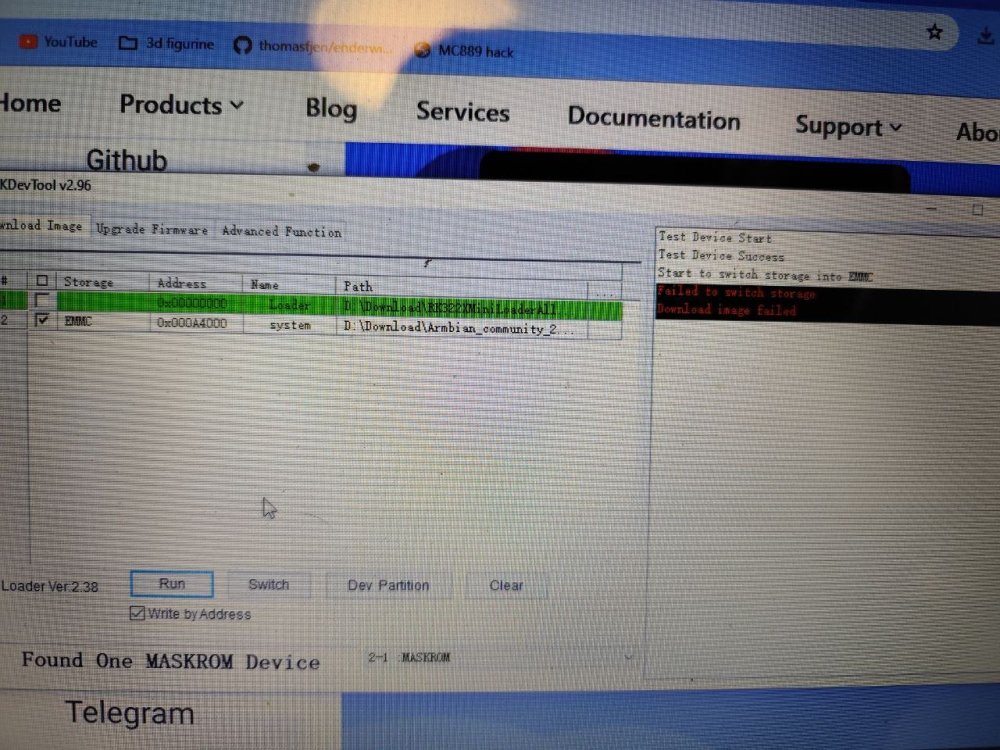
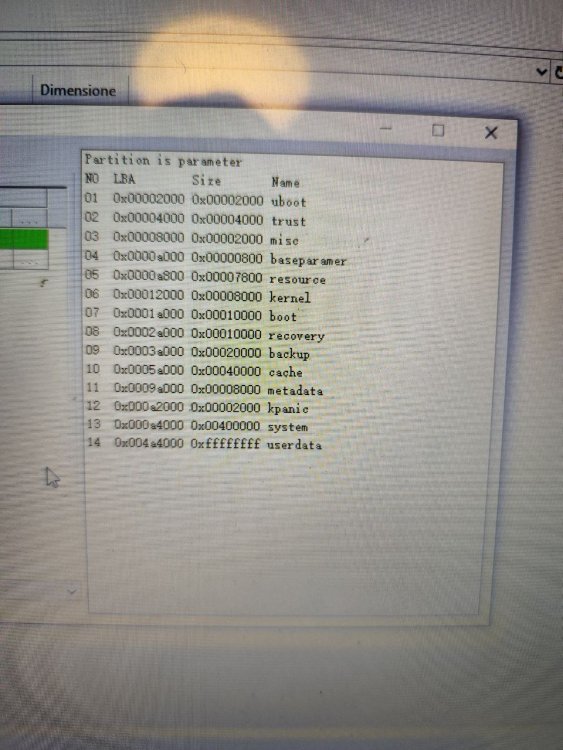
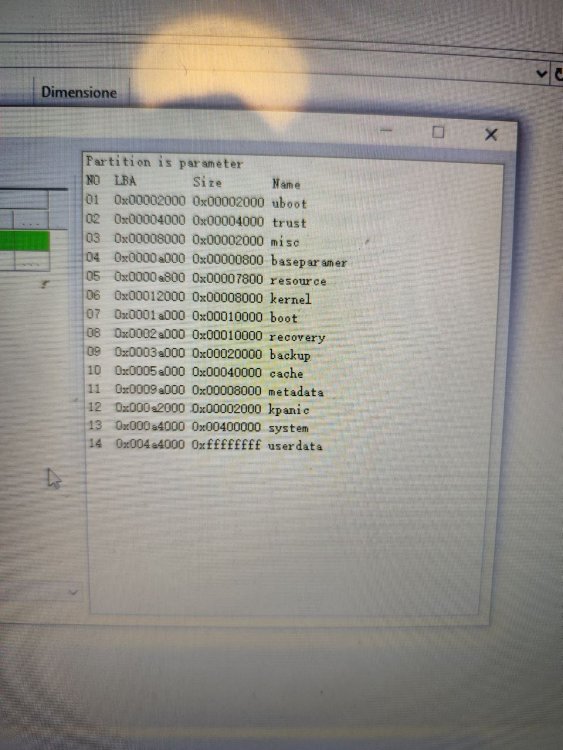
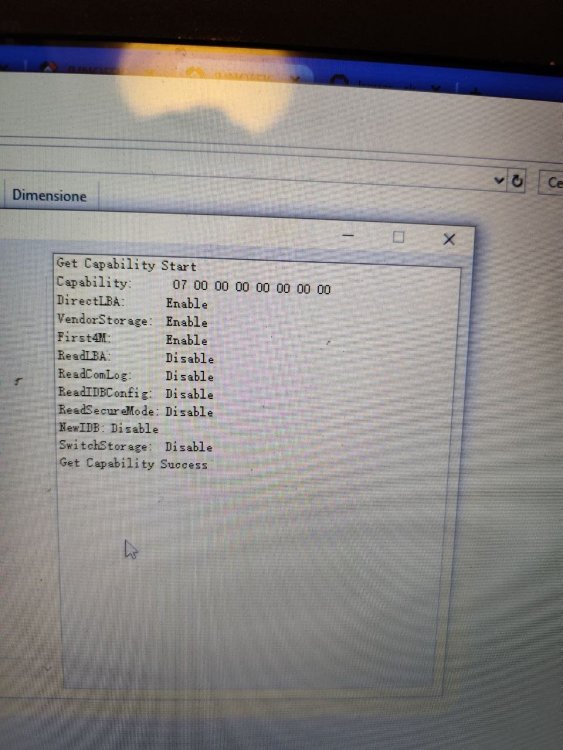
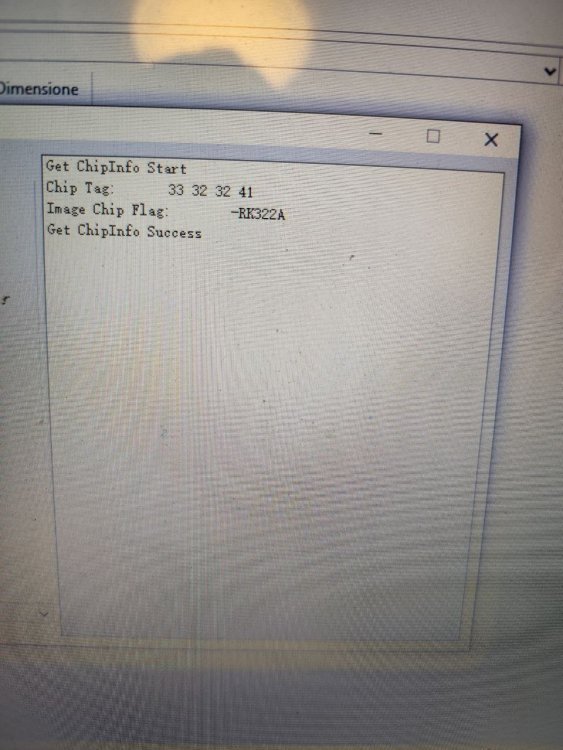
I think i find where all my trouble start. i can doownload to the box the rk322x_loader_v1.10.238_256.bin but i can't switch to the emmc. Does anyone have ideas of what to do?
-
In my first post, I shared it in a file called "spi-display-overlay.txt". Yes, I know it’s strange that it’s in a .txt file — but it’s there nonetheless. But you know what? Here it is : /dts-v1/; /plugin/; / { compatible = "allwinner,sun50i-h616"; /* Orange Pi Lite SoC */ fragment@0 { target = <&spi0>; /* SPI0 bus */ __overlay__ { status = "okay"; }; }; fragment@1 { target = <&spi0>; __overlay__ { #address-cells = <1>; #size-cells = <0>; ili9486: ili9486@0 { compatible = "ilitek,ili9486"; reg = <0>; /* CS0 */ spi-max-frequency = <24000000>; /* Speed of SPI */ rotate = <0>; fps = <30>; buswidth = <8>; regwidth = <16>; bgr = <0>; reset-gpios = <&pio 2 8 1>; /* PC08 */ dc-gpios = <&pio 2 7 0>; /* PC07 */ init = <0x10000b0 0x00 0x1000011 0x20000ff 0x100003a 0x55 0x1000036 0x28 0x10000c2 0x44 0x10000c5 0x00 0x00 0x00 0x00 0x10000e0 0x0f 0x1f 0x1c 0x0c 0x0f 0x08 0x48 0x98 0x37 0x0a 0x13 0x04 0x11 0x0d 0x00 0x10000e1 0x0f 0x32 0x2e 0x0b 0x0d 0x05 0x47 0x75 0x37 0x06 0x10 0x03 0x24 0x20 0x00 0x1000036 0x28 0x1000011 0x1000029>; }; }; }; };
-

S905X2-SDMC Tech DV8549 Getting Armbian Running
Parth replied to Parth's topic in TV Boxes running Armbian
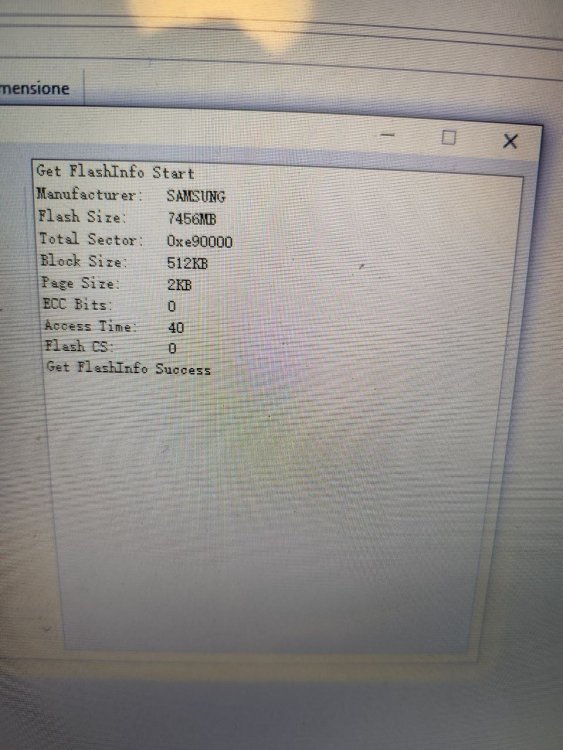
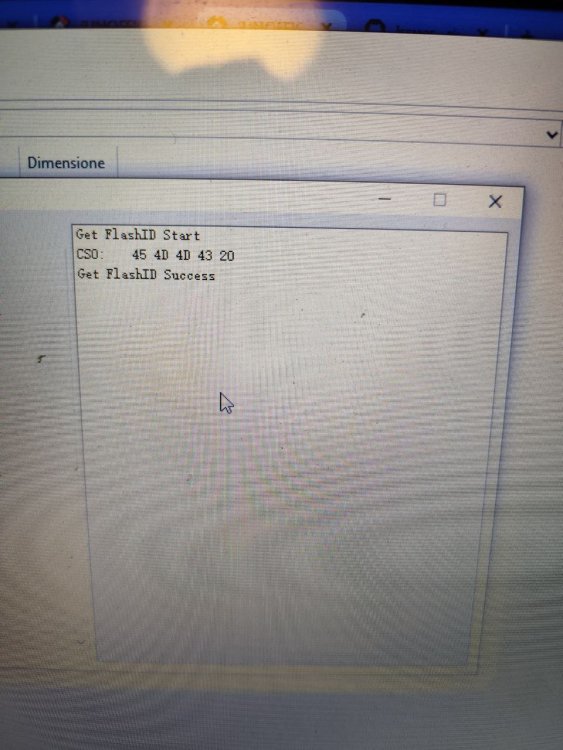
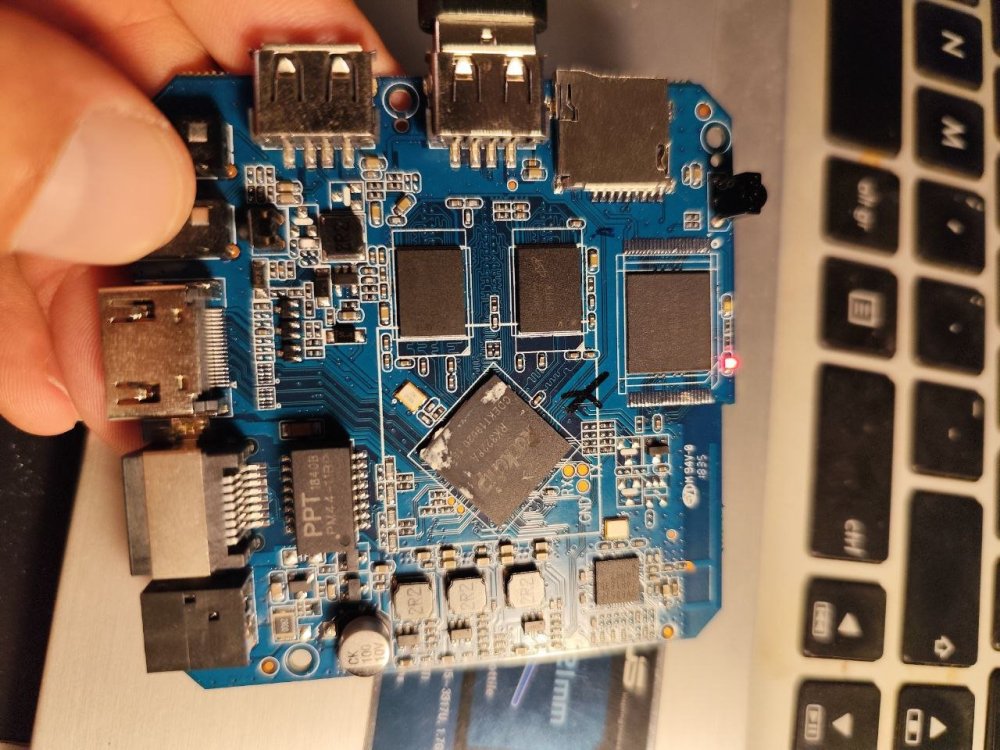
well @SteeMan i tried all the possible instructions and everything i could possibly try. Usb does not power the board, which most of the generic chinese TV Boxes do, we plug the usb, power it , it can detect the things and we put the sd card and we are good to go, that does not happen on this board since, the SDCard slot is not there, and apart from that you have to power it externally it will not detect the USB power. Upon trying to short the pins which are shown, would only take me into the WorldCup mode, but even after going into that, and following with all the possible files, which are meant to update it, like in some videos, it would not take up the file honestly, rather it would get stuck to the point where it is mainly trying to read the emmc block. would not go any further ahead of that. The other option is to use the amlogic usb burning tool, now again, that tool like so many videos online would not show me any details whatsoever, it will not show up my box for me to be able to flash it. there are uart pins, it only shows the following things. no matter what key strokes i give it will never stop nor do anything fancy for me, it will straight boot into its OS. so all the provided instructions already online are not at all of any help for this. Instead im wiling to go multiple steps further, like i had mentioned initially and those would be the following. Try and pull out the EMMC from the board and use a reader to read it? But i am lost even after i read the data, and if i wish to put back anything lets say armbian, what should i do next? flash it from the emmc reader? or put it back on the board and try to see then what all burning method works? apart from the EMMC pull out, i am unsure what else might as well work here, i am least interested now to even run android back on it since i would require multiple files which only the factory can provide maybe? (heard this from my linux developer friends who make roms) which i do not have. my final call would be to simply design my own custom PCB and pull out the Processor, RAM and EMMC and build our own DTB and use it, but again, i am not sure and unaware of the fact that if there are things flashed on the S905X itself or everything that is stopping me is on the EMMC? and if making my own board which is the last option, would even be worth it?
-

noble server and xfce fail to start up properly on RPi5
c0rnelius replied to Janos Szigetvari's topic in Raspberry Pi
Same deal using Noble; https://paste.armbian.com/orexafoxen.less -
TX95 Max - Allwinner H618 Quadcore Cortex - A53
Nick A replied to Mark Waples's topic in Allwinner CPU Boxes
@Gilliard Gabriel Rodrigues Mark was using my Transpeed image. https://github.com/NickAlilovic/build/releases/tag/20250306 -
 Hi all, digging into the Orange Pi 6 Plus specs for a potential build. Can anyone confirm the M.2 slots (the two Key-M 2280 ones) are PCIe Gen 4 with x4 lanes each? Official docs mention NVMe support but are light on details. I'm curious if this could handle a low-end GPU like an RX 570 (or even lower) through an NVMe-to-PCIe adapter/riser—thinking for light gaming or compute tasks. Has anyone tried eGPU setups on this board or similar ARM SBCs? What about power delivery, drivers, and performance? Running Linux (Ubuntu/Debian probably). Thanks for any insights or benchmarks!
Hi all, digging into the Orange Pi 6 Plus specs for a potential build. Can anyone confirm the M.2 slots (the two Key-M 2280 ones) are PCIe Gen 4 with x4 lanes each? Official docs mention NVMe support but are light on details. I'm curious if this could handle a low-end GPU like an RX 570 (or even lower) through an NVMe-to-PCIe adapter/riser—thinking for light gaming or compute tasks. Has anyone tried eGPU setups on this board or similar ARM SBCs? What about power delivery, drivers, and performance? Running Linux (Ubuntu/Debian probably). Thanks for any insights or benchmarks! -
Hey everyone, I'm eyeing the Orange Pi 6 Plus for some edge AI projects, given its 12-core CIX SoC, up to 28.8 TOPS NPU, and massive RAM options (16/32/64GB LPDDR5). Has anyone gotten Ollama running on it with NPU acceleration? Does it support it out of the box, or do you need to convert models (e.g., to INT4/INT8 formats) using custom tools like rkllama or similar? Additionally, with the higher RAM, can it handle bigger LLMs (like 13B+ models) more smoothly than lower-spec SBCs? Any benchmarks or tips on setups (e.g., Ubuntu/Debian installs, frameworks like MLC-LLM)? I'd love to hear real-world experiences—thanks!
-
https://github.com/armbian/build/blob/main/patch/kernel/archive/rockchip64-6.18/dt/rk3568-yy3568.dts
-
Simple GPIO toggling has been a long term issue and it is clear to me that it need continued attention. I only use pin toggle on RPi1 and NanoPi-NEO, so BCM2835 and AllwinnerH3. I use generic Linux gpiod, still a bit a workaround for really proper handling, but it is OK for non-critical tasks at home. I used original WiringPi on RPi before (from Gordon), but many forks now. See also: https://forums.raspberrypi.com/viewtopic.php?t=369361 'latest' seems to be here: https://github.com/WiringPi/WiringPi?tab=readme-ov-file Note what is written under Ports w.r.t. Python. I guess Werner's guess is correct. I am not good at Python so prepared a bit for own C-code implementation, also w.r.t. high speed PWM. On AllwinnerH3 running Armbian Trixie, using the lgpio examples was easy to toggle a pin. I currently have Domoticz doing it, so also easy MQTT messaging, but it is overkill and also Domoticz build for ARMv6 is not available anymore (needed for RPi0/1), so already replaced that.
-

ffmpeg with hardware accelerated encoding
schunckt replied to schunckt's topic in Software, Applications, Userspace
Thanks @eselarm for the details, very helpful! That's what i was expecting, but not sure. There is a /dev/media# device separated for each decoder and encoder, each with the source / proc / sink pipeline plus /dev/video# for each. Meanwhile i figured out there is a bug inside the sunxi_cedrus driver (enc by bootlin) but im still not done with the fix. As of now, since this morning i've now both video# devices where video0 appears as the decoder (as before) and now there is video2, encoder! T. btw. Thanks Paul @ bootlin 😃 👏 👍 -
We don't deal with android. I suggest to ask at xda developer forums or similar.
-
Success! It's still showing that first error, but using meson-gxbb-wetek-play2.dtb it was able to boot up and configure. Wifi works also. You guys are amazing! Thanks for all your inputs.
-

Beginner. Unable to build proper image for my rk3566 handheld
Hqnicolas replied to tomacaster's topic in Rockchip CPU Boxes
Just for fun? for Vendor u-boot I like the ArmSom RK3568 SDK https://github.com/gitacodes/armsom_rk3568_SDK it works fine in all my boards... for mainline U-boot, https://docs.armbian.com/Developer-Guide_Overview/ - Last week
-
Error trying to run apt upgrade. Here is the error I receive: The following packages have unmet dependencies: armbian-bsp-cli-rpi4b-current : Depends: base-files (>= 25.8.2) but 25.8.1-12.4+deb12u11-bookworm is to be installed E: Unable to correct problems, you have held broken packages. I am not sure how to resolve this. Help will be greatly appreciated.
-
@laibsch - I have my clearfog booting directly off SATA at this point. I achieved this a while ago by writing a "special" uboot binary to the very start of my SATA SSD, and later by writing an enhanced uboot image via `armbian-config` to SPI flash which doesn't require anything else. It's a very simple configuration now and much preferred over the old way. Good luck keeping your system operational and running well!
-
As a trusted partner of industry leaders like CLAAS, Ag Leader, and CCI, we are delighted to exhibit for the first time at one of the world’s leading agricultural trade fairs, taking place November 9–15. Meet us at the Digital Farm Center in Hall 21! View the full article
-
@jock this is the user-overlay patch I am using to enable both leds on the board. The "working" led is as usual a couple of alternating leds of red/blue. The led-ir is a standalone blue, I have triggered one to the "timer" and the other to "activity" , both running. I can confirm bluetooth, IR remote receiver are also working. Bluetooth needs BCM.hd (I have used BCM43342.hcd). For the wifi 2/5G the correct overlay is rk3318-box-wlan-ap6334. HDMI, despite apparently is initialized correctly and answering to all commands still gives a black screen. rk3318-box-led-overlay-ledA.dtso.txt
-
Is i2c-1 actually mapped out to i2c-1? It should be if the aliases are setup correctly. Secondly even if the i2c bus is enabled, have the pins been successful muxed into i2c mode? You should be able to check by: sudo cat /sys/kernel/debug/pinctrl/300b000.pinctrl/pinmux-pins | grep i2c